This article is the second of an ongoing series of posts documenting and describing our significant RV electrical upgrade. In our previous post, we outlined our requirements and created a schematic of a system that would meet our needs. We also discussed our desire to do the work incrementally, leaving the trailer in working order after each sub-project. Finally, we discussed our desire to build a 24 V system. In this post, we discuss a potential need for an alternative design and present its schematic. We also discuss the need to model our finished product, and we share our results.
Alternative Design
While we desire to build a 24 V system to reduce currents, Victron Energy does not currently produce a 24 V version of their MultiPlus-II 3000 VA 2x 120 V inverter/charger. However, we are hoping they announce such a device at the METS 2021 conference.
Figure 1 illustrates a schematic for a 12 V system that meets our requirements.
In case a suitable product does not become available, we have designed an alternative 12 V system. This version would not need a 24-12 V DC-DC converter, but increased system currents require larger wires to connect the battery bank to the inverter/charger. Figure 1 illustrates the schematic for our alternative design.
Modeling the System
Our desire to make incremental progress without wasting time or money requires us to see the outcome before taking our first steps. If we don’t know where each component will go and how it will be oriented, we will likely make mistakes that waste resources.
To visualize our project, we used Autodesk’s Fusion 360 3D modeling software to create a model of our RV’s pass-through storage space, our under-bed storage area, and the significant components of our system. Then, by placing the scale versions of the desired components into the modeled spaces, we can arrange and rearrange them to ensure the best overall final implementation. We can then undertake small projects without worrying about them negatively impacting future work. We can also simultaneously work on multiple projects that don’t interfere with one another.
RV Storage Spaces
We initially thought we would put both the power center components and the battery bank in the pass-through storage area. However, we decided to place the battery bank in the under-bed storage to reduce the temperature extremes it would otherwise experience.
Figure 2, The pass-through storage area, under the bed drawers, and storage space beneath the foot of the bed. Immediately above these modeled objects is where the mattress sits within the trailer.
Figure 3, The pass-through storage area is on the left, and the under-bed storage space is on the right.
Figure 2 illustrates the pass-through and under-bed storage areas of our trailer. It might be helpful to note that the mattress sits immediately on top of these modeled objects. The under-bed storage comprises two drawers, and immediately above them, a small storage space accessible by lifting the foot of the bed. The area illustrated in Figure 3 seemed to be an ideal place for our battery bank.
Figure 4, The space between the drawers is sufficient for four Lion Energy UT 1200 batteries.
However, we discovered some completely wasted space between the two drawers during our modeling efforts, see Figure 4. This space is almost large enough for four Lion Energy UT 1200 batteries. Some modifications will be necessary, but using this space will leave both the under-bed and pass-through storage areas free for their intended purposes.
This example points out the sound practice of measuring things out and opening up places in your RV to determine what is there and what’s available. You never know when you may need a bit of space for one thing or another.
Modeled Components
Modeling the trailer spaces gave us a great reason to learn a bit about Fusion 360. While we aren’t experts, we learned enough to model each of the major components we’ll use in our system. These models are not precise, but their overall dimensions and appearance are accurate enough for our purposes.
This modeling effort enabled us to place each component, move them around, ensure adequate spacing, etc. The implementation illustrated in Figures 5 and 6 was achieved by adding a wall in our pass-through storage space and placing the modeled components. As previously mentioned, we may have to implement a 12 V alternative by removing the DC-DC converter and adjusting fuse values appropriately.
Figure 5, This is the front view of the RV Power Center showing the layout of all major components. The solar charge controller and PV breaker are in the upper left. The DC-DC converter is in the lower left. The inverter/charger is in the center of the figure, while on the right side, we have from top to bottom the Cerbo GX monitoring system, the SmartShunt, battery disconnect switch, and the Lynx Distributor.
Figure 6, This top view of the RV Power Center component layout demonstrates sufficient clearance from all devices, walls, doors, etc.
Figure 7, The four batteries fit nicely between the drawers with the 300 A Class T fuse nearby.
As previously mentioned, the battery bank will be located between the drawers in the under-bed storage area. In addition, we’ll build a small shelf near the batteries where our 300 A Class T fuse will be located. The battery cables will pass through the thin wall between the under-bed area and the pass-through storage area and then travel down to the left in Figure 7 until they reach the battery switch and SmartShunt.
Summary
In this post, we discussed our alternative 12 V design and modeled the physical spaces and components in the hope that we get it all right the first time around. This may be an optimistic goal, but having this detailed plan in hand will enable small projects to fit more seamlessly together. Now the work begins.
We spent more than 30 years tent camping and backpacking with our children, but recently we’ve transitioned to a bumper pull RV. We continue to love camping in the great outdoors but like to do so with all of the luxuries of life, glamping. We love the solitude and the noises of nature and tolerate crowded campgrounds and the noise of generators that start each morning and run through the day. Instead, we want to take a different path. We want the best of both worlds, and this series of posts will document our path that leads there.
The Big Picture
We want the ability to use our microwave, television, and other 120 V AC systems without having to ruin our camping solitude with a generator. In addition, we want to minimize the intrusion of our generator while recharging our batteries.
On a typical day of camping in our RV, we consume 1400 Watt-hours or approximately 115 Ah of our 12 V system. About 30 Ah are consumed watching television for a few hours and 85 Ah for lights, fans, heater blower, etc. We want to watch TV for several hours per day and use a game console for several additional hours. In addition, we want to use our microwave for making snacks along the way.
Using our TV for six hours consumes 60 Ah, three hours of our game console consumes 30 Ah, and our microwave for 10 minutes consumes 13 Ah, totaling 103 Ah. This usage, combined with the 85 Ah mentioned above, brings the total to nearly 200 Ah. To ensure some reserve power, we’re planning on a 400 Ah battery bank. To recharge our batteries each day, without having to hear that noisy generator, we’re planning on 800 Watts of solar.
To accommodate our AC devices, including the TV, game console, and microwave, we need an inverter/charger capable of producing 1320 Watts or more. We’d also like to use our air conditioner for short periods to keep our dog comfortable while we shop, eat in a restaurant, take a short hike, etc. Our air conditioner consumes approximately 1500 Watts. We also desire the charger to charge our battery bank as quickly as possible for those terrible days when we have to run our generator. Our RV is wired for a 50 A service, and this should be passed through to the circuit panel when connected to shore power.
In summary, we want to enjoy the quiet solitude of camping and some of the luxuries of life. We want to do this with as few detrimental modifications to our trailer as possible. Several items will make this goal a reality:
400 Ah of lithium-ion batteries
800 Watts of solar power
An inverter that is capable of producing nearly 3000 Watts of 120 V AC power
A battery charger that is capable of consuming our entire generator output to minimize charge time
Our Plan
We intend to accomplish our previously outlined goals incrementally so that between projects, our trailer is still functional. Therefore, our first step was to develop our design so we could start breaking it into sub-projects. Figure 1 is the schematic of the plan we intend to implement.
We made an early design choice to create a 24 V system with four 12 V lithium-ion batteries. We chose this because the components we intend to use work at 12 or 24 V, and at 24 V, the system currents will be cut in half, reducing wire size and decreasing unwanted heat dissipation.
Figure 1, Schematic diagram of 24 Volt electrical system with 12 Volts available for backward compatibility with existing RV systems.
We intend to locate most of the equipment illustrated in Figure 1 in the left-hand side of our pass-through storage area near the front of our trailer. We’re going to call this location our power center. The solar panels will go on the RV roof, and the batteries are going under our bed which is just to the rear of the pass-through storage area.
Currently, our trailer is configured in a fairly standard way. We have two Lion Energy UT 1200 lithium-ion batteries mounted on the front a-frame of our trailer and housed in conventional plastic battery boxes. We have some solar on the roof with the solar charge controller mounted in a bedroom closet, and the rest of the electrical components and wiring are factory default. Our upgrade project will require a lot of time and work, and as previously mentioned, we intend to do it incrementally and leave our trailer in shape for traveling between sub-projects. Our tasks include:
Constructing the new power center with sufficient space and strength to mount all of the components in our design.
Adding solar panels, routing PV cables to our new power center, mounting our charge controller and disconnect switch, and connecting to our original battery bank.
Making room for our four batteries under our bed.
Connecting the batteries in a parallel/series configuration to obtain our desired 24 Volt system and interfacing this new battery bank to the existing RV systems.
Routing AC lines from the power center to the existing RC circuit panel and back.
Mounting the remaining components in the power center and wiring them into the system.
Configuring each prgrammable component.
Thoroughly testing the system, cleaning up flaws, and enjoying the outcome
This post is the first in a series to document our journey from where we are to where we want to be. Each sub-project above will be thoroughly described in separate posts, and we’ll include the good, the bad, and the ugly. We hope you enjoy our journey.
This post describes technology building blocks to enable digital transformation at Utah Valley University, but the principles and concepts are universal. Utah Valley University is digitally transforming. The faculty and staff are excited about the possibilities and are envisioning a better future for our students. Students should expect our transformation to yield richer experiences, enhanced learning activities, increased skill acquisition, and a less burdensome path to completion and success. Our faculty and staff should experience less administrative burden allowing them to provide exceptional care, exceptional accountability, and exceptional results to our students and one another.
To facilitate digital transformation, the Office of Information Technology (OIT) and Academic and Student Digital Services (ASDS) must also transform. They must provide reliable and easy-to-use technology solutions that faculty and staff can use to enhance their interactions with others and improve the products and services they deliver. OIT and ASDS must adapt, modernize, provide existing products and services at a reduced cost, and provide new products and services with exceptional customer service.
In general, products and services should be available via self-service, 24 by 7, and ample support to make technology consumers successful, satisfied, and even delighted. The remainder of this post describes architectures, principles, and philosophies intended to make these necessary changes and the dream described above possible.
Application Programming Interfaces
Application programming interfaces (APIs) make it easier for others to interact with applications, create and use alternative user interfaces, and use the available services for alternative and even unexpected purposes. When acquiring or developing an application, it must have an API, and preferably a RESTful one. Data, services, and processes needed to build an application are used to create an API. The resulting API is then consumed to deliver a user experience. Mashup Corporation by Andy Mulholland et al. is a short fictional read that illustrates these concepts and the enabling power of APIs.
To make them most valuable, APIs must be exposed and consumed through API management tools. APIs should be more than simple JSON-based CRUD interfaces; APIs should expose appropriate business logic so that API consumers cannot violate required business processes. Enforcing this principle allows others to build delightful user experiences without institutional concern about policy, practice, or process compliance.
Domain-Driven Design
Everyone should read at least the first two chapters of the book Implementing Domain-Driven Design by Vaughn Vernon! Here is my super-short summary of domain-driven design (DDD) and those chapters — bring domain experts and developers together to create a ubiquitous language embedded in the application code itself. In addition, define or determine bounded contexts wherein this language is valid. This exercise helps software developers genuinely understand the business processes they are being asked to automate. It also helps the business participants understand the code being written and allows them to question decisions, test assumptions, and find bugs before deployment. This collaborative group of business leaders and developers is “the team”; success or failure is in their hands.
Microservices
Microservices are an architectural style that will be used at UVU to create larger systems. Systems built using microservices are loosely coupled; I would even go as far as saying they are highly decoupled, implement a single business capability, have well-defined interfaces, and communicate using only these interfaces. The size of a microservice is governed by the associated bounded context, go, and read the DDD book! At UVU, an essential part of a microservices’ interface is its ability to raise events. Go figure out why.
Event-Driven Architecture (EDA)
Systems that poll are inefficient! Build systems that raise events so other systems don’t have to waste time and resources. You can keep asking me if you must do this, but you can be assured that when I change my mind, I’ll let you know. If you didn’t find the humor in the last sentence, then reread the links.
Application Acquisition
When we purchase applications, we should give preference and a strong preference to those running in the cloud. When we build services or applications, they should use the most abstract service offerings that make sense. In other words, we should not instantiate servers and consume storage and then build queues, notification services, etc. We should instead use services such as queues, notification systems, serverless functions, etc.
DevOps
DevOps is a culture and practice that we hope will result in rapid development, testing, and software deployment. We also hope this increases accountability by allowing those who develop an application to be responsible for running and supporting it. Nothing motivates a developer to fix a bug more than to wake them to fix it repeatedly. Teams, DDD teams, are in charge and responsible for the functionality, performance, and reliability of “their” products.
If those in the hardware world think you’re off the hook, think again. Software is eating the world. The days of interacting with network switches, routers, firewalls, servers, storage appliances, AV equipment, etc., are over. Learn to program, learn to configure hardware devices using programs, remember to use DevOps principles to configure, test, and deploy hardware platforms as rapidly as “other” developers – that’s right, you just became developers!
Where to Compute
We built data centers and populated them with servers, storage systems, and network components in the past. As CPU performance increased, computers became more able to run multiple applications, but stability due to unintentional application interaction made this approach intolerable.
We found ourselves with many underutilized servers running single applications to maintain reliability. Along came server virtualization enabling us to instantiate multiple virtual servers on each physical server. Over the past several years, the number of physical servers has diminished considerably.
Well, we’re in the middle of another paradigm shift. We are continuing our journey that will result in our compute and storage being somewhere else. Acquired applications will also run in the “cloud.” in either case, they will not be housed here.
Networks
Unlike server and storage, I believe we will have a wired and wireless network on campus for the foreseeable future. However, the way we deploy, configure, and maintain these networks will change drastically. Remember, software is eating the world, and networking is not an exception to the rule. Network components will be physically installed in some generic way and then configured remotely via software. In a DevOps fashion, when a problem occurs, you’ll figure out what went wrong in the configuration script, you’ll repair the script, you’ll test the script, and you’ll redeploy.
Final Thoughts – For Now!
We have a great team! Let’s pursue all this FUN with great enthusiasm. Let us share our best thinking with others: share code on GitHub, answer questions on StackOverflow, blog about your experiences, publish papers, present at conferences, participate in panel discussions. In short, learn, teach one another, and teach the world!
Many universities cut back or closed permanently during the pandemic. UVU, instead, graduated its largest class in its history — 6,410 students — last fall.
Much of the credit goes to Dr. Astrid Tuminez, who now enters her third year as the university’s president. She’s the perfect person for the job — a veteran in the tech sector.
Even before the pandemic disrupted in-person learning, she made sure UVU was prepared.
UVU wants technology to drive and enhance every aspect of the student experience, from recruitment to graduation.
The technological revolution is alive and well in the shadow of Silicon Slopes, and that will continue long after masks and social distancing are relics of the past.
In response to Mr. Benson’s article, several individuals asked the question, what is UVU actually doing that is different from other institutions? What is UVU’s secret sauce? Well, that is a question worth answering. It isn’t as much about what we are doing as who we are. The remainder of this post will address who we are, the culture of UVU, and what we’ve done and will be doing.
Higher Education
In Clayton M. Christensen’s book, The Innovator’s Dilemma, he discusses how established industries must change to stay competitive. If they are unwilling or unable to change, they are doomed to eventual failure. We’re all familiar with GAFA or Google (1998), Amazon (1994), Facebook (2004), and Apple (1976). I’m old enough to remember alternative search engines, bookstores, mySpace, and computer companies such as Digital Equipment Corp., Compaq, and IBM. While some of these still exist, they have become less prominent in the fields dominated by the big four. What happened? Innovators, who founded the big four, disrupted the existing market space, and the previous big players weren’t able to or chose not to compete. By the time they realized there was danger of losing their markets, it was far too late.
According to Britannica, the first true university in the West was founded at Bologna late in the 11th century. Interestingly, Britannica, a company older than the United States, but only 1/4 the modern university’s age, who up until 2012 sold a 32 volume encyclopedia set for $1400, had to adapt to a new market. Britannica stopped printing its collection it had printed every other year since 1768 and now offers annual online subscriptions for $70.
Like Britannica and many other companies in many industries, higher education must adapt to changing needs and demands. If higher education institutions are unwilling or unable to change, they run the risk of becoming irrelevant. Our students will demand and deserve that we offer education in a form that they can and want to consume. They will demand that their education leads to the acquisition of good-paying jobs. Employers want access to students and graduates with the hard and soft skills they need to be competitive. Finally, society demands higher education provide all of the above without sacrificing the education the students need to become productive and civil members of our world community.
History, Clayton Christensen, and GAFA teach us that if we in higher education are unable or unwilling to adapt, we will be replaced by innovators who take the initiative to deliver a more modern education. We see some of this already happening with Grow with Google, Microsoft Learn, Great Learning, HackBright Academy, DevMountain, Western Governors University Academy, BYU Pathway Worldwide, and many others. So, how do we adapt to changing needs and wants while maintaining our identity as a university? Part of the solution is taking advantage of information technology and applying it where and when it increases student success, learning, and completion rates and decreases time to completion and cost.
UVU’s Secret Sauce
While nearly every higher education institution is putting classes online, training faculty to work remotely, and strengthening IT infrastructure, UVU is truly transforming the educational landscape. This starts with the exceptional can-do culture developed over the years by our students, faculty, and staff. Our students are diverse, inclusive, and gritty, our faculty put student success above their own professional aspirations, our amazing staff proactively reach out to students to help them be successful, our administration focuses on student success, and our president, Dr. Astrid Tuminez, resonates with our students, understands what an education can do for them, and understands how and where technology can help.
Digital Transformation
Digital transformation is about transforming the way an institution does business. In our case, it is about making education better, more accessible, with fewer administrative burdens for students and faculty. Digital transformation is about using technology in the right way, in the right places, and at the right times to help students complete their educational dreams and be successful.
To do this, digital transformation efforts must be aligned with institutional goals and strategy. UVU has an exceptional strategy document entitled Vision 2030. Vision 2030 includes the UVU Mission Statement that reads, “Utah Valley University is an integrated university and community college that educates every student for success in work and life through excellence in engaged teaching, services, and scholarship.” Vision 2030 outlines three strategies:
Enhance student success and accelerate completion of meaningful credentials
Improve accessibility, flexibility, and affordability for all current and future UVU students
Strengthen partnerships for community, workforce, and economic development
Strategy Map
To ensure our digital transformation efforts are aligned with institutional strategy, we created, with assistance from PM2 Consulting, a strategy map, which is a diagram that shows an organization’s strategy on a single page.
At the top and center of a strategy map, we place the organization’s mission or vision statement. Stacked down the map’s left side are four perspectives: customers or stakeholders, internal processes, enablers, and financial.
Within each perspective, we place a small number of strategic objectives. Arrows indicate how one or more strategic objectives help accomplish others. Our strategy map is illustrated in Figure 1. For details regarding the creation of our strategy map, see my post, Digital Transformation Strategy.
Figure 1: Strategy map for the UVU Division of Digital Transformation, including strategic objectives and associated weights.
The UVU Division of Digital Transformation pursues the institutional strategies of achieving student success, including all students, and engaging our partners. We accomplish this by delivering delightful experiences, providing transformative solutions, strengthening our partnerships, and practicing exceptional product portfolio management. These strategies are supported by a culture of being responsive, manifesting UVU values, and developing our staff.
Where the Rubber Meets the Road
As much as I like our strategy, it is only as good as the associated tactics and our ability to make needed changes and progress. So what have we done? Like nearly all institutions of higher education, in response to the COVID-19 pandemic, we immediately bolstered our campus networks, increased cybersecurity, added classroom technology to enable multiple teaching modalities, including remote, live streaming instruction, acquired several hundred laptops for student checkout from the library, and procured a couple of hundred WiFi hotspots with unlimited data bandwidth to provide student connectivity. However, while we dealt with the immediate needs of our students and faculty, we also made changes for the post-pandemic world of higher education:
We created an Academic and Student Digital Services (ASDS) organization to focus on the teaching, learning, and academic administration technologies and services that will be delightful to use and enhance our ability to achieve student success.
We reorganized the existing Office of Information Technology.
We combined previously distributed IT organizations.
We organized a product portfolio management group to enable us to practice exceptional product portfolio management.
Within these groups, we organized units to focus on:
Identity and access management
Communications
Website, intranet, and mobile application design
Business intelligence
Academic systems
We hired two associate vice presidents to lead our Office of Information Technology and our Academic and Student Digital Services groups.
We named a Senior Director of Product and Portfolio Management and charged them to ensure our products and services are delightful and transformative.
In addition to these organizational shifts and adjustments to enhance our ability to focus and transform our work at UVU, we also initiated numerous critical projects that will enhance student success:
We initiated a project to move from our traditional PBX-based phone system to Microsoft Phone System technology. This move will enable remote faculty and staff to reach out to students from anywhere in the world, using nearly any device, and appear as if they’re placing the call from their campus office. This change adds functionality, makes the experience more delightful, and saves the university money.
We began a new student-centric mobile application that will enable students to accomplish many of their administrative functions on their mobile devices. They will be able to check their academic progress, set appointments and communicate with their academic advisor, add and drop classes, pay tuition and fees, and see events, classes, exams, and final exam schedules. In the future, the UVU mobile app will include voice recognition, be a digital assistant, and act as their ID card.
We started a project to create a campus Intranet using MS Teams as the core component. Just today, Microsoft introduced Viva, a new product that may meet our needs. A modern intranet will provide us with the means to communicate better as a campus community.
We continued creating a business intelligence system that will assist all campus areas in utilizing data and information to make informed decisions. This will help students track their progress, faculty reach more students, general communication, and facilitate the use of artificial intelligence (AI) across the institution.
We began a complete rework of the UVU identity management system. This work will result in students, faculty, and staff being digital equals. While different roles and responsibilities will enable each individual to access the information pertinent to their roles, this equality will foster communication, calendaring, and virtual meetings.
These initiatives are a direct result of choosing to pursue activities that support our strategic objectives. In one way or another, they all increase the institution’s ability to help students succeed.
Summary
Utah Valley University is a special place where students, faculty, and staff understand its mission, strategies, and values. However, these are not merely the institution’s, but they’re ours, we know them, we love them, and we live them. We do all that we do to express exceptional care, exceptional accountability, and exceptional results. We are digitally transforming the university because we want our students to succeed in a digitally transforming world. So what is our secret sauce? It is a set of amazing people, driven by a common mission, directed by strategy, and guided by a set of values we’re committed to expressing in all that we do. Digital transformation at UVU is simply applying technology where, when, and how it helps people reach their full potential. We care, are accountable, and promise results!
We all understand that communication is vital. We use one form of communication or another almost continuously. I carefully chose the word disruptive as part of this post’s title because both common definitions are applicable:
causing or tending to cause disruption
innovative or groundbreaking
While communication is intended to be helpful, excessive, irrelevant, or unwanted communication is disruptive. There really can be “too much of a good thing.” However, there is a disruptive, technology-enabled approach that can make communication better.
Communication
There are numerous forms and types of communication. This post focuses on what I call team communication, marketing communication, and incident or issue communication. These communication types are important but can become less useful, even disruptive, due to excessive, irrelevant, or unwanted communication, noise.
Team Communication
Various organizations and human resource departments have carried out many employee satisfaction or engagement surveys. When employees are asked what could be improved, the top answer is always the same, team communication. No matter how thoroughly I have communicated as a leader, my employees have always indicated that they want more communication.
While increased communication is initially appreciated, eventually, the increased volume and breadth of topics are taxing. Eventually, the communication becomes ineffective because the interesting stuff, from one person’s perspective, is lost within the noise of what might be interesting to others – “one man’s trash is another man’s treasure.”
Marketing Communication
Marketing is a form of communication that regularly impacts us. Believers, I am giving them the benefit of the doubt here, in a particular product or service, attempt to inform us of the benefits of their wares in the hopes that, armed with this new knowledge, we’ll acquire, purchase, or subscribe to their products. This communication is vital to businesses and individuals seeking solutions to problems. However, excessive and irrelevant marketing communication reduces its value and may become an irritant.
Incident or Issue Communication
The technology revolution brought the need to communicate technology incidents, issues, and failures to those relying on it. However, like the other forms of communication discussed earlier, too much or irrelevant information, no matter how well-intended, becomes an issue in and of itself.
Transformational Solution
So how do we successfully communicate more without communicating irrelevant information in potentially excessive amounts? The key is realizing that “beauty is in the eye of the beholder,” or, in this case, the receiver of communication. Technology provides a mechanism where those receiving communication can subscribe to the types of communication they desire and decide how they want to receive it.
Use Case
Several weeks ago, Utah Valley University’s Faculty Senate passed a resolution that essentially requested that faculty receive a push notification whenever a critical teaching tool was experiencing issues that would negatively impact their academic activities. They also requested that these communications not be the typical IT service desk responses that they deem to be too long, technical, and exhaustive.
While the institution has a web site to indicate IT systems’ status, status.uvu.edu, it doesn’t meet the criteria outlined previously. It is pull oriented, requiring the faculty to visit the page in reaction to an outage or suspicion of a failure, it reports the status of multiple campus IT systems, many of which are not related to teaching or other academic activities, and it contains far too much technical detail for their needs.
A Solution
A couple of brilliant colleagues of mine read the Faculty Senate’s resolution and decided they could quickly deliver a solution to the problem. They created a tool associated with the IT status page that allows system status to be communicated via text (SMS), email, and even a webhook for integration with other applications.
In addition to providing multiple consumer selectable communication channels, they also provided a mechanism to allow the consumer to choose which service notifications they receive. So, not only can faculty now receive push notifications via text, they can receive text messages for services that impact them. They might choose to be notified about issues or outages affecting our learning management system (LMS), our student information system (SIS), or our classroom technology. They can choose not to be notified about issues and outages regarding systems that don’t impact them. Finally, they can change their settings at any time to meet their changing needs.
Generalization
While the tool described above is for IT incident communication, the principle applies to team and marketing communication. I often hear colleagues complaining about institutional or marketing communication being overwhelming, irrelevant, and disruptive. Many indicate that they delete the communication, believing that it isn’t important or critical to their work.
Imagine a system that enables institutional consumers to subscribe to the content they are interested in and not receive the rest. Also, they could choose the communication channel they’d like to use. In fact, by combining these two features, individuals could choose the information they would like to receive via text, what they would like to receive via email, what they would like to receive through other channels, and what they don’t want.
By allowing consumers to prioritize what they receive and how they receive it, they can remove disruptive noise from their work and lives. This helps them be more productive. The communication they receive will be more impactful and less disturbing.
With such a mechanism in place, a broader set of communications can be supported and tolerated. Institutional entities such as fine arts, performing arts, athletics, clubs, etc., could be invited to communicate as they see fit. In current systems, this invitation would flood our inboxes and increase our level of frustration. With this new paradigm, consumers would receive what they want and discard the rest.
Even external entities could be invited to communicate with and market to our institutional community. For example, a flower shop or restaurant may want to market to our students, faculty, and staff. Such involvement shouldn’t bother individuals or the institution because the only receivers of such communication would be those who opted to receive it. If a vendor becomes disruptive, consumers will unsubscribe.
One final thought. There are a few communication types that all members of our community should receive. For example, emergency notifications should be received by everyone. Having all users receive this type of critical communication is easily provided for.
Summary
In this post, I described several types of communication and pointed out their importance. I also pointed out that when we communicate too often and too broadly, it becomes irrelevant to some. To avoid this issue, we should build a communication platform where our community members can subscribe to what they want and unsubscribe from the rest. We currently have this system in place for IT incident reports but should create a more general tool, let’s call it NotifyMe.
Dr. David Kellermann from the University of New South Wales spoke to the Utah Valley University (UVU) community at a recent UVU Digital Transformation Seminar. His topic was Education 4.0 and the integrated tools he uses to enhance his students’ engagement and learning. His presentation can be seen here, by members of the UVU community, and on YouTube. This post will briefly discuss past and current educational practices, introduce Education 4.0 and highlight a few key takeaways from Dr. Kellermann’s lecture.
Education: Past and Present
Education 1.0 was developed centuries ago and was refined up through the 20th century. Education 2.0 began when educators and students started using digital technology to enhance their educational experience. Education 3.0 is best characterized by the availability of learning content through mechanisms other than traditional higher education. Today, many have access to the Internet, YouTube, Microsoft Learn, LinkedIn Learning, Pluralsight, and other rich content providers. Learning resources are available to students when and where they want them and at little or no cost.
However, higher education institutions are still creating much of their own content and providing it on their terms. Course offerings, schedules, student information, and institutional content are often consumed by and exposed through monolithic and dated tools such as student information systems (SISs), learning management systems (LMSs), etc. Often the organizations delivering these tools harvest a vast amount of institutional and student information to improve their offerings and develop new technologies to market. To make matters worse, the more intellectual investment we make in such tools, the more difficult it is to move to something better.
Many of our students want to move beyond this traditional educational model. They are demanding Education 4.0 functionality such as collaborative real-time editing, video calls/communication, chat interaction, mobile functionality, cloud storage, and the ubiquitous use of AI and natural language processing. In his lecture, Dr. Kellermann noted that even his Education 3.0 online work consisted of a collection of PDF lecture notes and an associated list of video captured lectures. He realized that the content on YouTube and other sites was superior in many ways. This inspired him to make online learning better and even superior to on-campus learning.
Education 4.0 is transforming our academic approach, including the design, delivery, and assessment of teaching and learning. We have to transform content creation and acquisition, delivery mechanisms, learning spaces, assessment approaches, student mentoring, advising services, and learning tools. Education 4.0 students must use and be immersed in the tools that Industry 4.0 demands: data analysis, artificial intelligence, machine learning, automation, robotics, Internet of things, etc.
Takeaways
There are many interesting aspects of Dr. Kellermann’s setup and work. I’ll point out a few here, but you may well find others that you find more compelling in his lecture. His work is clearly in the realm of Education 4.0 so hang on, keep your arms and legs within the ride at all times, and enjoy a glimpse of the future.
Microsoft Teams
At the center of Dr. Kellermann’s toolset is Microsoft Teams. However, he uses a variety of Microsoft tools to add functionality to his class offerings. If you are unfamiliar with Teams, you can learn more about it from the UVU Digital Transformation Learning Gallery. Just think of your class as a team and Teams being the tool that allows you to share files with them, chat with them, initiate video meetings, interact with applications in real-time, assess student accomplishment, give them feedback, and share applications with them. It’s the hub that every topic below depends on.
Dr. Kellermann creates a team for each class, including all students in the class, his assistants, and himself. Teams have channels, and he creates a channel for each week of his class. Each channel contains learning objects, assessment tools, assignments, etc., related to a particular topic. Within each channel, there are tabs that are essentially applications. There may be a chat tab, a gradebook tab, an assignment tab, etc. Each channel may have the same tabs or a different set of tabs depending on the need.
Technology Setup
Dr. Kellermann’s technology setup is novel and intriguing. I may miss a few details, but essentially he has two camera views and a screen view to stream to his students. He can switch between these three views with a simple handheld remote. The primary camera view is of him lecturing beside a Microsoft Surface Hub. From here, he can use Teams to display a class notebook created using OneNote, present Powerpoint presentations, review documents, etc. The Surface Hub allows multi-touch functionality and on-screen marking with digital ink.
The second camera view is from a camera on top of the Surface Hub. This view is useful when working on a problem on the Surface Hub, as we might do on a whiteboard. This enables him to work “at the board” while still facing the remote students.
The screen view of the Surface Hub allows fine detail to be viewed by a remote audience. The surface hub displays branding for the institution and a picture in picture feature allowing Dr. Kellermann to be seen even during screen sharing. It also includes a chat area where students and Dr. Kellermann can communicate and, more importantly, where students can communicate freely and answer one another’s questions.
Dr. Kellermann also has a separate screen where he can easily view chats and acquire questions to be answered. Finally, he has included reasonable lighting, a good sound system, and a color adapting light source to backlight the screen. You’ll fully appreciate the setup after viewing him in action.
Class Recordings
Class recordings can be very useful for students. Using Teams, a class recording is as simple as pushing a virtual button. The entire meeting, including the chats, are recorded and stored in Microsoft Streams. Once in Streams, recordings are transcribed, and the resulting texts are available for reading, searching, etc. It is simple to search the transcription for topics of interest, click on that portion of the transcription, and the associated video starts playing at that point. Recorded videos can be manipulated using Microsoft’s Power Automate to create a video gallery that can be included within Teams as a tab within the associated class.
Legacy Courseware
We all know it is a tremendous amount of work to move developed courseware from one learning management system to another. Dr. Kellermann points out that he no longer uses an LMS at all, but moving courseware to a completely different type of tool all at once isn’t easy either. Not to fear, an LMS can be easily added to Teams as a tab within a course. What’s better is that since the students are within a class in Teams, they have already authenticated. When they go to the LMS tab, they don’t need to authenticate again, and they are taken directly to the class associated with their class in Teams. This ability allows for a metered transition from a class using an LMS to one no longer dependent on it. This enables faculty and staff to collaboratively determine a smooth and well-supported migration.
Bots and Artificial Intelligence
Dr. Kellermann has invested significant time and resources into developing a question bot, called QBot, based on Microsoft’s Bot Framework. He has made QBot publicly available on GitHub. When a student inserts a question in the chat window and references @Q, the QBot looks up the class and section the student is in, determines the teacher’s assistants associated with the class, and sends them a cell phone notification indicating they have a question to respond to.
Also, QBot uses natural language processing and AI to parse the question and determines if it “knows,” with a high probability, the answer to the question. If QBot is confident, it responds immediately with an answer. Remember where we discussed the transcriptions from recorded class lectures? QBot also has access to those transcriptions, and if it believes that the question is addressed in a lecture, it points the student to that very moment of class instruction. If QBot isn’t confident that it “knows” the answer, it remains silent. However, it recognizes when the teacher’s assistant responds and uses that answer to enhance its collection of question and answer pairs; better luck next time. It should be noted that AI is not used to replace people but connect them and enhance their interactions.
Data, Data, and More Data
With the class in Teams, there is a vast amount of resulting data that can be used to enhance education. This data is private to the institution and not accessible by the tool provider, in this case, Microsoft. For example, attendance, quiz outcomes, homework scores, and test results for each student for each topic are easily extracted. Another Microsoft tool, Power BI, can create dashboards for visualizing and acting on this data. Additionally, AI can be employed to look at previous semester data with associated final exam and class scores to predict where each student needs help. This data can be used to construct a personalized study guide to maximize student learning and help them succeed.
Summary
We are currently at the end of an era, Education 3.0, but our students are running ahead of us and expecting us to join them in the era of Education 4.0. To join our students, we must transform the institution; we must change our technology architectures, culture, tools, processes, and practices. Dr. David Kellermann has worked hard to develop a set of tools and practices that work well for him. I am confident that each institution, each faculty, and our great students will find a slightly different set of tools and practices that are right for them. I’m excited about Education 4.0 at Utah Valley University and can’t wait to see the student success it yields!
A strategy should inform an institution where business process improvements will have the largest impact on realizing its mission. Both for-profit and non-profit institutions should pursue projects and initiatives that help them reach their strategic goals. A strategy should help guide what projects and initiatives are pursued.
In a for-profit institution, the main strategy is to increase profits. Projects should be pursued if they have the potential to increase revenue, decrease expense, or both. In such a setting, it is reasonably straightforward to compute a financial return on investment (ROI) for digital transformation projects and initiatives and use it to prioritize them.
In a non-profit institution of higher education, our main strategy is to help students succeed. Projects and initiatives should be pursued to help the institution reach its strategic goals. Computing a financial ROI in this setting is not straightforward and perhaps not beneficial; therefore, we need an alternative mechanism for prioritizing which projects and initiatives to pursue. The ideal metric is a measure of a project’s ability to decrease the gap between where an institution is concerning its strategic goals and where it will be after the project is complete, i.e., its strategic value. Those projects with the most potential to decrease the strategic gap have the highest strategic value and should be pursued.
This post will describe the creation of the strategy map for the UVU Division of Digital Transformation. I’ll also describe three ontologies we’ve created:
An impact ontology that illustrates the impact divisional business processes should have on our strategic objectives.
A performance ontology that describes the impact our business processes are currently having on our strategic objectives.
A project ontology that illustrates each project’s strategic value or its ability to close strategic gaps.
The impact and performance ontologies are used to determine the strategic gap between possible impact and current performance. The project ontology determines which projects have high strategic value in closing the identified strategic gaps. Finally, a list of projects and initiatives, prioritized using their strategic value, is presented.
Utah Valley University
In early 2019, Utah Valley University (UVU) organized a Digital Transformation Task Force, which issued its final report in April 2019. In their report, the task force defined digital transformation like this:
“Digital transformation is the process of applying technology to fundamentally change how organizations operate and provide value to those served. Digital transformation requires an integrated enterprise approach to workflow, process, data management, technology, and culture.”
The use of digital technology and an accompanying change in culture will allow the university to reduce complexity, function efficiently, and provide delightful products, processes, and services to our students, faculty, and staff. While digital transformation strategies and tactics must be aligned with the institutional mission and strategic initiatives, they must also be easily understood and implemented by those participating in the transformation of digital technology, culture, and institutional practice.
Institutional Mission and Strategy
Digital transformation efforts must be aligned with institutional goals and strategy. UVU has an exceptional strategy document entitled Vision 2030. Vision 2030 includes the UVU Mission Statement that reads, “Utah Valley University is an integrated university and community college that educates every student for success in work and life through excellence in engaged teaching, services, and scholarship.” Vision 2030 outlines three strategies, with accompanying priority initiatives, employed to accomplish its mission:
Enhance student success and accelerate completion of meaningful credentials
Assess and remove barriers at every stage of the student life cycle
Support completion through comprehensively designed curriculum and services
Enhance educational quality through the recruitment and retention of excellent and engaging faculty and staff
Improve accessibility, flexibility, and affordability for all current and future UVU students
Build out a coordinated multi-campus plan
Expand flexible educational and online offerings
Strengthen outreach to and support for underrepresented students
Maintain commitment to affordability and accessibility
Strengthen partnerships for community, workforce, and economic development
Create seamless processes and practices for student transition from K-12 to UVU
Improve industry partnerships to meet workforce and community needs
Strengthen engaged learning and community engagement opportunities for students, faculty, and staff
Strategy Map
A strategy map is a diagram that shows an organization’s strategy on a single page. A strategy map has three significant uses:
It helps every employee understand their organization’s overall strategy and where they fit in.
It helps keep everyone literally on the same page.
It helps employees see how their work helps the institution meet its strategic objectives.
At the top and center of a strategy map, we place the organization’s mission or vision statement. Stacked down the map’s left side are four perspectives: financial, customers or stakeholders, internal processes, and enablers. A for-profit enterprise would typically place the perspectives from top to bottom in the order previously described. In a non-profit organization like UVU, we place the financial perspective at the bottom. Making money is not our aim, but financial objectives support everything else we do.
Within each perspective, we place a small number of strategic objectives. Arrows indicate how one or more strategic objectives help accomplish others. Finally, we add a weight to each strategic objective indicating the amount of effort and resource we want to commit to them currently. While most aspects of the strategy map remain as is for a considerable length of time, the weights assigned to each objective should be regularly reviewed and potentially adjusted to meet changing needs.
We created a strategy map for Digital Transformation at UVU with Brett Knowles and others at Hirebook. Brett and his colleagues patiently helped us craft our strategy, asked probing questions that refined our language, and acquainted us with powerful ontologies and techniques to connect our project work with our strategic objectives.
Figure 1: Strategy map for the UVU Division of Digital Transformation, including strategic objectives and associated weights.
At the top and center of the strategy map, illustrated in Figure 1, is an abbreviated form of the UVU Mission Statement. You can see the four perspectives down the figure’s left side: stakeholders, internal processes, enablers, and financial. We’ve added brief definitions of each perspective to help us remember who or what is included in each. Within each perspective, we have added strategic objectives.
Within the financial perspective, we have a single strategic objective, Plan, Budget, and Assess, which represents the UVU planning and budgeting process known as PBA. We used a shared governance approach, with much discussion and compromise, to determine the weight associated with each strategic objective. In this case, we determined that we’ll spend 10% of our effort and resources on this objective. This strategic objective supports all other objectives in the strategy map. Arrows have been omitted for clarity.
The enablers perspective contains three strategic objectives: Be Responsive, Invest in Staff Development, and Manifest UVU Values. Accomplishing these strategic objectives is essential to enable the organization to accomplish the strategic objectives above them. We must invest in staff development to ensure they continue to be productive professionals who can deliver high-quality results. The staff must also be responsive, i.e., react quickly and positively to institutional concerns and needs. Finally, they must manifest UVU values of exceptional care, exceptional accountability, and exceptional results. This perspective will receive 35% of our effort and resources.
The perspective dealing with internal processes contains four strategic objectives: Practice Exceptional Product Portfolio Management, Provide Transformative Solutions, Strengthen Our Partnerships, and Deliver Delightful Experiences. Our division doesn’t currently have a strong practice in product portfolio management. We must develop this process to enable the delivery of the other three strategic objectives in this perspective. A strong product portfolio management process will strengthen our relationships with internal partners and enable our organization to provide transformative solutions. Together these three strategic objectives will enable our division to deliver delightful experiences to our stakeholders. This perspective will currently receive 50% of our attention and resources.
The stakeholders perspective includes three strategic objectives: Achieve Student Success, Include All Learners, and Engage Our Partners. While we organize our division, strengthen our internal processes, and develop our staff, we will only expend 5% of our effort and resources on these strategic objectives. However, these objectives are shared by all divisions at UVU. We expect that pursuing the strategic objectives in the internal processes and enablers perspectives will increase other divisions’ ability to focus on these important strategic objectives.
Impact Ontology
An impact ontology describes the impact that business processes ideally have on strategic objectives. The UVU Division of Digital Transformation has nine major business processes:
Financial
Product Portfolio Management
Operations
Service Management
Human Resources
Research and Development
Data Delivery
Risk and Security Management
Digital Transformation Strategic Planning
Note that these nine business processes are not necessarily organizational units.
Figure 2: Impact ontology for the UVU Division of Digital Transformation, including major business processes, strategic objectives, and indicators of the potential impact business processes ideally have on associated strategic objectives.
The impact ontology illustrated in Figure 2 shows the impact that business objectives have on achieving strategic objectives. Our nine business processes are included across the top. The strategic objectives and associated weights from the strategy map are included down the figure’s left side. We have a value from zero to five at the intersection of each business process and strategic objective. Like the strategic objective weights, these values were obtained through a shared governance exercise and much discussion. Zeros indicate that the associated business objective has no impact on reaching the associated strategic objective. In contrast, fives indicate that the associated business process strongly influences reaching the associated strategic objective. The grey levels are added to aid in identifying impactful business processes. For the UVU Division of Digital Transformation, the Operations business process impacts our strategic objective of Delivering Delightful Experiences but does not impact our objective of Invest in Staff Development.
We can glean other interesting information from an impact ontology. For example, intersections containing fours or fives identify business processes that greatly impact the associated strategic objectives. We should monitor these processes using key performance indicators (KPIs) and improve them. Additionally, a business process owner can use the column associated with their business process to determine where to deploy their best people and the most resource for the greatest impact. Finally, looking across a row tells us which business processes should be represented in activities intended to enhance the institution’s ability to achieve the associated strategic objective.
Performance Ontology
The performance ontology illustrated in Figure 3 shows a relationship between business processes and strategic objectives.
Figure 3: Performance ontology for the UVU Division of Digital Transformation, including major business processes, strategic objectives, impact measures, and indicators of how the current performance of business processes are impacting associated strategic objectives.
In this case, the relationship we’re mapping is how well our organization performs each business process to pursue associated strategic objectives. Like the previously discussed impact ontology, the performance ontology includes our nine business processes across the top. The strategic objectives and associated weights are included down the figure’s left side. For convenience, we have included the impact ontology values from Figure 2. We have added a score from one to five, indicating how our organization performs each business process to pursue associated strategic objectives. These scores were obtained through self-evaluation and much discussion. In the future, these scores should be obtained through the measurement and evaluation of key performance indicators (KPIs). The color-coding indicates the magnitude of the strategic gap. The strategic gap is calculated by taking the difference between the impact a business process should have on a strategic objective and the actual performance we’re achieving and then multiplying by the strategic objective’s weight.
The color-coding of the performance ontology directs attention to important areas where there is a strategic gap. For example, the Data Delivery business process and Deliver Delightful Experiences strategic objective. In this case, the difference between the potential impact of the business process, determined to be a four, and our current performance, determined to be a two, multiplied by a strategic objective weighting of 17 creates a significant strategic gap of 34, is color-coded red, and demands our attention. The Operations business process has a potential impact of four on Manifest UVU Values while our performance receives a value of two. The impact and performance values are identical to those of the previous example. Still, a lower strategic objective weighting of 7 results in a strategic gap of 14, is color-coded yellow, and deserves less attention. Similarly, the Data Delivery business process’s desired impact on Achieve Student Success is a four while our performance yields a two. A strategic gap exists, but because the importance of that strategic objective is low, the strategic gap of 4 doesn’t warrant our attention and is color-coded green.
Strategic Gap
As previously described, the difference between impact and performance, weighted by the importance of a strategic objective, results in a strategic gap measure.
Figure 4: Strategic Objective Gap graph where the total bar height indicates the desired level of impact, the blue bars represent the current performance level, and the yellow bars the magnitude of the existing strategic gap.
The yellow portion of each bar illustrated in Figure 4 represents the total strategic gap for the associated strategic objective. The yellow portion’s height is the difference between the desired impact, total bar height, and our current performance, height of the blue portion. In the figure, the strategic objectives are ordered from greatest to the least strategic gap. The largest strategic gap in Figure 4 is for the Deliver Delightful Experiences strategic objective.
Each bar’s height is the total impact we desire to exert on each of the strategic objectives. This is computed for each strategic objective by multiplying the strategic objective’s weight and the sum of the business process impacts for the given strategic objective. This result is multiplied by five to enhance visualization.
The blue portion of each bar represents our current performance towards each of the strategic objectives. This is computed for each strategic objective by multiplying the strategic objective’s weight and the sum of the business process performance values for the given strategic objective. This result is also multiplied by five to enhance visualization.
Project Ontology
The previous section illustrated a process for determining which strategic objectives have significant strategic gaps and need attention. We want to pursue the projects and initiatives with the highest strategic value or the greatest promise of decreasing strategic gaps. Figure 5 shows the project ontology, where we can discover which projects have that promise.
Figure 5: Project ontology showing the impact various projects have on closing the strategic gap for each strategic objective, their strategic value.
The project ontology includes the strategic objectives on the figure’s left side and across the top a list of potential projects and their costs. The costs are in $100,000 increments and include cash and the value of required labor.
The values within the ontology range from zero (blank) to five, where zero indicates the associated project has no ability to close the strategic gap of the associated strategic objective. These projects have no strategic value concerning the associated strategic objective. Five indicates that the associated project has high strategic value and will significantly decrease the strategic gap of the associated strategic objective. For example, a project to create a mobile application will result in a product that significantly closes the gap for several strategic objectives, including Achieve Student Success, Include All Learners, Deliver Delightful Experiences, Provide Transformative Solutions, Strengthen Our Partnerships, Be Responsive, and Manifest UVU Values. This project has a high strategic value.
Figure 6: Strategic Objective Gap Closing graph illustrates the ability of a suite of proposed projects in closing the strategic gap for various strategic objectives.
In Figure 6, the yellow bars represent the strategic gap for each strategic objective, as described in the previous section. The red dots indicate the sum of the projects’ strategic values that impact the associated strategic objective. The successful completion of the proposed projects, which have significant strategic value, would nearly eliminate the strategic gap associated with several objectives: Deliver Delightful Experiences, Be Responsive, Strengthen Our Partnerships, Achieve Student Success, Include All Learners, and Engage Our Partners. In contrast, the other strategic objectives receive insufficient project work of sufficient strategic value to eliminate their strategic gaps.
If resources are fully allocated, the results illustrated in this figure may be used to adjust what projects and initiatives are pursued to distribute the strategic value more uniformly. Alternatively, if more resources are available to pursue additional projects, the graph indicates where strategic value is needed, which may be used to select appropriate projects.
Project Priority and Value
As shown in the previous section, a suite of projects may significantly decrease strategic gaps. However, the ability to close a strategic gap may also be attributed to individual projects. We should pursue projects and initiatives that have significant strategic value, i.e., significantly decrease strategic gaps.
Figure 7: Initiative Impact illustrates the strategic gap closing value of each of the proposed projects and initiatives. The dark blue bars illustrate project value in terms of strategic value per dollar spent.
Figure 7 illustrates the strategic value or gap-closing ability of each project and initiative. The initiative with the highest strategic value is creating a business intelligence unit and associated governance and processes. Projects to create a new web site, intranet portal, and mobile application are also strategically valuable.
The dark blue bars in Figure 7 indicate the impact value of each project. This is simply a project’s strategic value divided by the project’s cost. The MS Telephony project may not be strategically impactful, but it saves the institution money and has nearly zero cost.
As a division, we will seek approval and funding to pursue the strategically most impactful projects, those with high value, and those that save the institution money that may be applied to other high impact projects.
Summary
As pointed out earlier, a strategy should inform where improvements in business processes should be made and what projects and initiatives should be pursued. In this post, I described a process to determine the gap between an organization’s desired performance level and its current performance concerning strategic objectives. Also, a method to determine the strategic value of projects and initiatives was described. Combining these two activities enables us to evaluate proposed projects and initiatives in terms of which will best help us meet our strategic objectives. In environments where ROI is difficult to determine, this is a powerful tool to help us realize our mission.
Monday, March 16, 2020, I ended a 31-year career at Brigham Young University (BYU) and started in a new role at Utah Valley University (UVU). I accepted the newly created position of Vice President of Digital Transformation and CIO. I was hopeful that I could stay above the tactical problems associated with IT systems and focus on the institution’s digital transformation. While that was a worthy goal, COVID-19 put a damper on most strategic thinking and a significant focus on getting 4,000 courses online and ensuring that the Office of IT-supported that effort.
While the initial intent was to get to know my new team, help them understand my expectations and plans, and hire an admin and an associate vice president, COVID-19 put an end to all of that. My initial introduction to the team was a virtual team meeting, and our message was to stay safe, stay alive, and work from home if you can.
This week wasn’t the perfect traditional first week, but it was ideal for me to join the team at UVU. I think I have already contributed, and I hope to contribute much more as we move forward. I am encouraged by how quickly the cabinet, led by President Astrid S. Tuminez, adapts to new challenges and moves to new communication mechanisms and processes. She’s a great leader, and her team is anxious to serve UVU students. We hope the students are safe and ready to learn remotely.
Since acquiring my first telescope nearly 40 years ago, I have dreamed of capturing images of the Andromeda Galaxy (M31) and Orion’s Nebula (M42). Well, finally the day, or rather nights, came for collecting the light from these distant beauties.
This post describes the location where the presented images were collected and the settings used to collect them. In addition, two observations are included.
Dark Skies
My home suffers from skies polluted with city lights, lights from a nearby high school, and of course lights from neighbors. So my search for dark skies began. Living in Utah, dark skies are within an hour or two drive, but finding a night or two free from other activities, clouds, and a bright moon is not easy.
On November 9, 2018, my wife and I took our RV and telescope to the Wedge Overlook Campground in Utah. The outing and location are described on our Trailer Travels blog. This location is quite dark, our weekend was free, and there was no moon. The only challenge was the temperature which dipped well into the 20s. However, for astrophotography, this wasn’t much of a challenge. I simply framed the objects, started the exposure sequences, and went into the RV and watched movies in a warm environment; it was great.
The Images
The equipment used to collect the presented images is described in my First Attempt post. For the Andromeda Galaxy (M31) images, I collected 100 sub-exposures. Each sub was exposed for 30 seconds for a total exposure time of 50 minutes. Keep in mind that these images are shot at f/2 using the CPC 1100 and the Hyperstar system. This would be equivalent to 100 sub-exposures with exposure durations of 4 minutes each on an f/5.6 system, about 6.7 hours of total exposure time.
I’d love to try many more exposures and many more exposures at shorter exposure times and compare results. However, on this outing, I tried collecting light from many objects rather than focusing on a few. I won’t repeat that mistake. Each sub-exposure was collected with a camera gain of 93 (unity gain) and an offset of 12.
In addition to the sub-exposures described above, flats, darks, and bias frames were collected and processed as described in my previous post. The resulting image of the Andromeda Galaxy (M31) was processed in Adobe Camera Raw and finished with Adobe Photoshop.
For the Orion Nebula (M42) images, I collected 10 sub-exposures of 30 seconds each and 100 sub-exposures of 5 seconds each. This is a total exposure time of 13.3 minutes. Again, keep in mind that these images are shot at f/2 and are equivalent to 10 sub-exposures of 240 seconds each plus 100 sub-exposures of 40 seconds each, for a total of 1.8 hours.
As before, flats, darks, and bias frames were collected and processed as described in my First Attempt post. The result was two images of the nebula that were processed in Adobe Camera Raw and finished with Adobe Photoshop. Finally, the two images were selectively merged. The image created using the 5-second subs provided the core of the nebula and the image from the 30-second subs was used to provide the subtle nebulosity near the outer edges of the nebula.
Observations
In the future I will focus my efforts on one or two objects per night and try an array of exposure times, a number of subs, etc. rather than trying to acquire data for 5 or 6 objects. The time required to frame, focus, and take samples wasted a lot of time and in the end only resulted in two usable images.
You may notice that the shape of the stars in the image appears a bit triangular in shape. I believe this is due to a collimation error in my optical path. I have acquired a laser collimator and Hyperstar attachment and will use them to test my hypothesis and correct the problem if it exists. Hopefully, my next images will be better than those presented here.
This post documents my first attempts at astrophotography with the Celestron CPC 1100 GPS telescope and the Hyperstar imaging system. My first targets were Markarian’s Chain and the Pinwheel galaxy (M101). Unfortunately, the targets were captured in an environment polluted by lights from a neighboring high school and multiple street lights. The remainder of this post describes the equipment used, the process used to capture and improve them and the images captured.
Equipment
The main equipment used to capture Markarian’s Chain and M101 was a Celestron CPC 1100 GPS telescope, the Hyperstar 3 system and a ZWO ASI071MC Pro camera. In this configuration, the CPC 1100 becomes a 560mm focal length f/2 system. The telescope was mounted on the Celestron HD Pro Wedge which increased tracking accuracy allowing for longer exposures. The camera was connected via USB 3.0 to a laptop running Nebulosity 4 for image capture. The resulting images were processed using Photoshop.
Capturing and Pre-processing Images
Target images contain the desired signal as well as noise from several sources: bias, thermal and optical system imperfections. Bias noise represents the electronic signature of the camera. Thermal noise becomes more evident with long exposure times and warm sensors. Optical system imperfections include vignetting and other characteristics specific to a particular optical system. Many target and calibration images are taken, processed and combined to reduce noise. This section describes the images that are captured and the processing necessary to yield results.
Bias Frames
As previously mentioned, bias noise is created by the electronics of the camera used to capture the images of interest. By capturing short exposure images with the camera’s lens cap on, they contain little noise from thermal or optical issues. These images are collected with the same camera gain used to collect target images. The bias frames collected are averaged to create a master bias frame. How this master bias frame is used during processing will be described shortly. It is important to point out that every frame contains bias noise regardless of exposure time or how cool the sensor is kept.
Dark Frames
Dark frames contain both bias and thermal noise. They are acquired by placing the lens cap on the camera and taking exposures equivalent to those used to acquire the target images. It is ideal to have the camera at the same temperature, use the same gain and the same exposure times that were used to capture the target sub-images. Like bias frames, these frames are averaged resulting in a master dark frame.
Flat Frames
Flat frames contain bias noise as well as artifacts of the optical system. These artifacts include vignetting, dust on lenses, mirrors and sensors, and other optical system imperfections. While there are multiple ways to collect these frames, I use the t-shirt method. I place two layers of a white t-shirt over the aperture of the telescope and take numerous exposures. The focus and orientation of the camera to the optical system are kept consistent with those used when the target images were collected. The exposure times are controlled to give reasonable exposures.
Sub-Exposures or Subs
The sub-exposures, or subs, are the acquired images of the target object including the described noise and imperfections. The optimum exposure time for subs is a hotly debated topic in numerous forums. Too short and the images contain too much read noise to result in good quality finished products. Too long, in areas like mine, and they are washed out from light pollution. Exposure times between 2 and 20 minutes seem common with the average being in the 3-5 minute range. Given that this f/2 system is 8-10 faster than most others, I use exposure times considerably shorter.
Pre-processing
The noise components of captured images cannot simply be subtracted resulting in a noise-free result, but the solution isn’t that much more complicated. One of the complications is that bias noise is contained in all captured frames. Let’s first consider the flats and the elimination of vignetting.
Flats contain data characterizing the optical issues of a particular system as well as bias noise. We begin by subtracting the master bias frame from each flat frame. The resulting flat frames have little thermal noise because they were acquired with short exposure times and the bias noise has been subtracted. The resulting frames are averaged to create a master flat frame.
The master dark frame, described above, is subtracted from each of the subs. The result is a set of images that contain target data and ideally no bias or thermal noise. Each of these frames is then divided by the master flat frame to remove the imperfections of the optical system. The result is a set of subs that ideally contain no noise or optical imperfections.
These subs are then de-mosaiced, converted to a full-color image, aligned, rotated and scaled using star images and averaged. The result is a single output image file with a much higher signal to noise ratio that can be post-processed to yield good results.
First Targets
The two targets of interest were Markarian’s Chain and the Pinwheel galaxy (M101). This section describes the subs taken and shows the results after post-processing in Photoshop.
Markarian’s Chain
The Markarian’s Chain sub-exposures were acquired using 50 second exposure times with a camera gain of 94 (unity gain). The figure to the right is one of the 110 sub-exposures. The most significant visual issue is the significant vignetting. In addition, these exposures are likely too long given the conditions. Future attempts will be made with more subs, but shorter exposure times.
Bias, dark and flat frames were collected and used to process these sub-exposure frames. The result was a single pre-processed image file that represented just over 1.5 hours of total exposure time. This image was processed using Photoshop resulting in my first finished product illustrated below.
The technical aspects of creating such an image are interesting to me, but in addition, I am always moved by the sheer immensity of space and the beauty of the creation. This image contains at least 10 galaxies each of which contains hundreds of millions of stars, that’s simply amazing and inspiring!
The Pinwheel Galaxy (M101)
The Pinwheel galaxy is located near the handle of the big dipper and was an enjoyable target to witness for the first time. Each sub-exposures was acquired with a 5 second exposure time with a camera gain of 200 and an offset of 50. The figure to the right is one of the 120 sub-exposures. The most significant visual issue is again the significant vignetting. In addition, there is significant noise due to the high gain used. In the future, I am unlikely to use gains greater than unity.
As with the Markarian’s Chain images, bias, dark and flat frames were collected and used to process the M101 sub-exposure frames. The result was a single pre-processed image file that represented 10 minutes of total exposure time. This image was processed using Photoshop resulting in the finished product illustrated below.
I look forward to targetting M101 again and experimenting with longer exposure times and perhaps capturing many more sub-exposures.
Summary
I am captivated by both the beauty of the universe and the technical aspects of capturing it. I can hardly wait for the next clear night and the opportunity that it will give me to capture more. I look forward to experimenting with more sub-exposures and varying exposure times. I look forward to experiencing the system in its f/7.5 configuration to increase magnification. While this will increase exposure time significantly, the challenge will be fun. Finally, I look forward to summer and fall and the new targets they’ll bring.

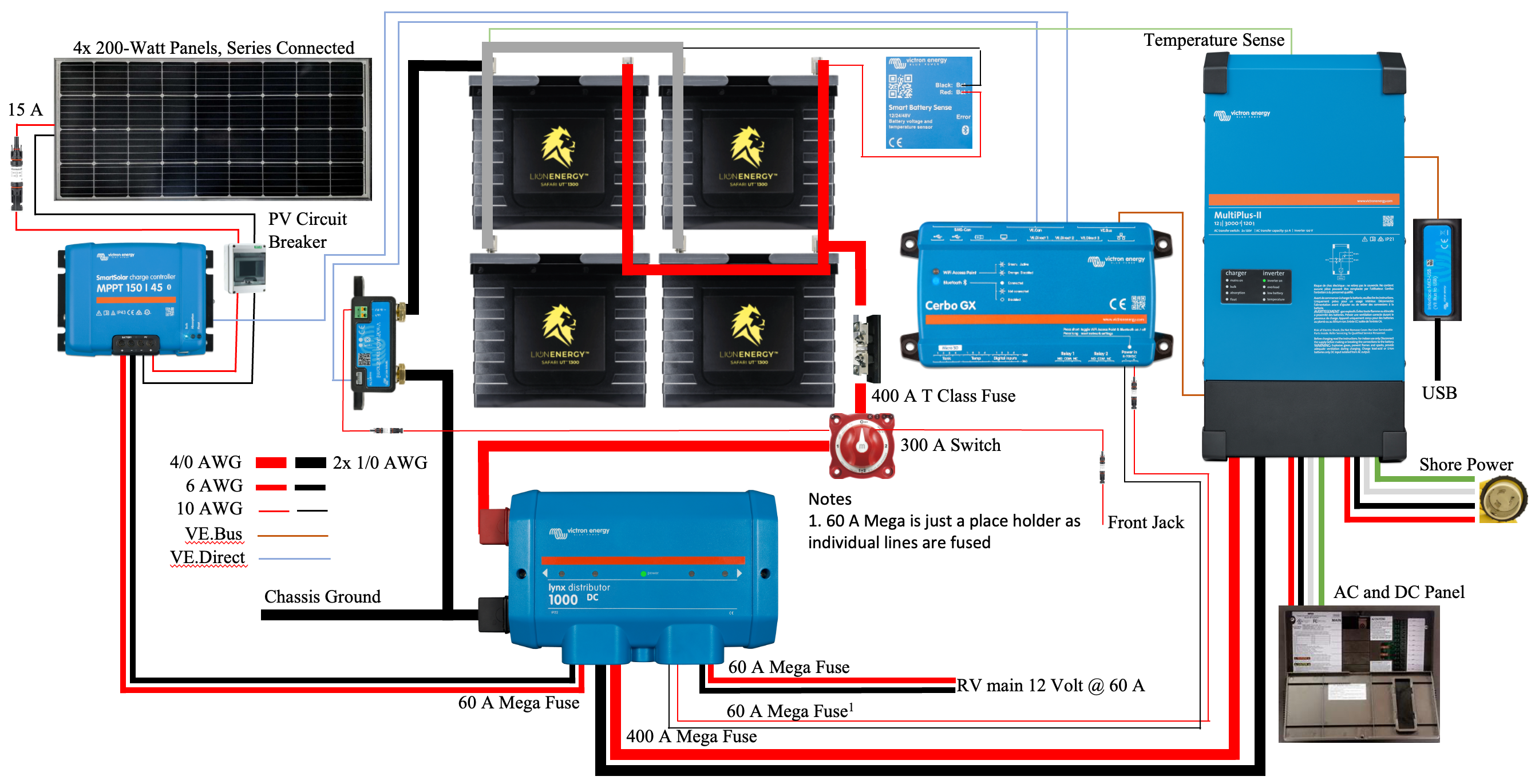
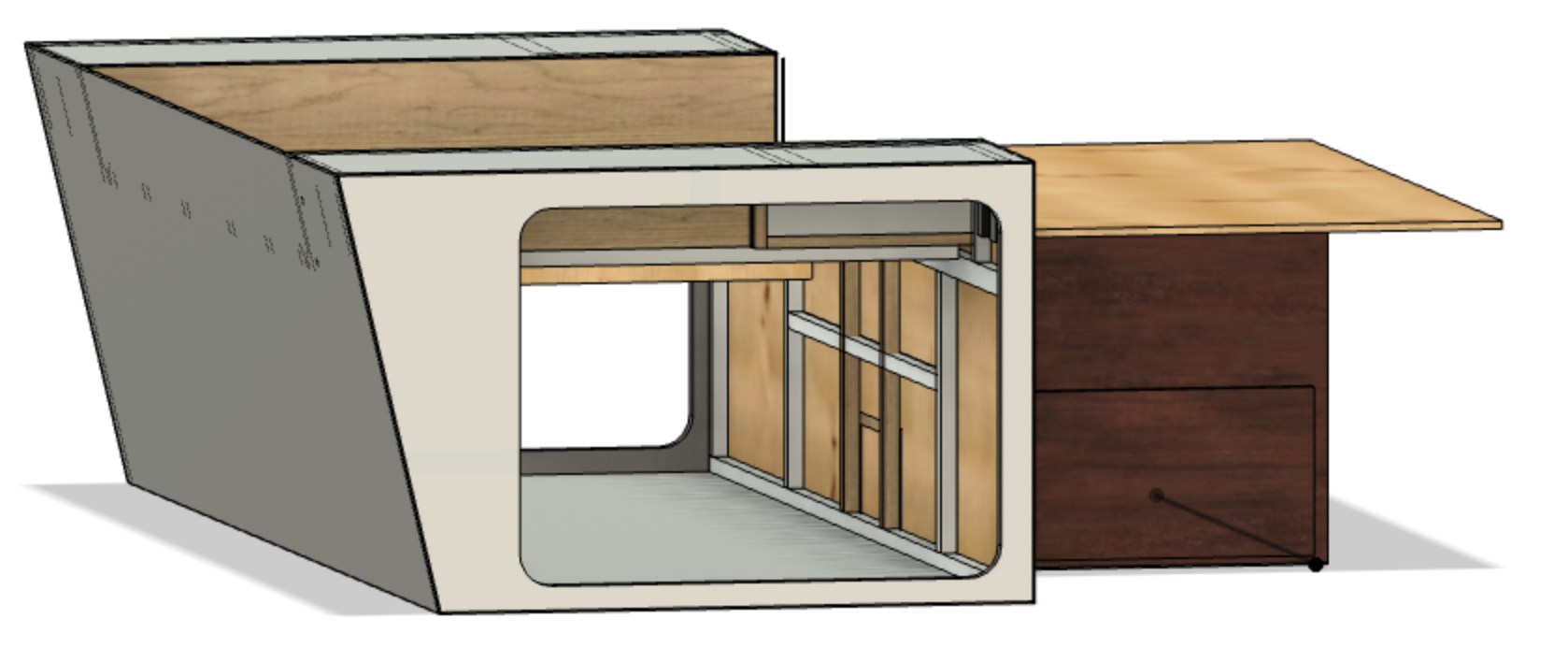
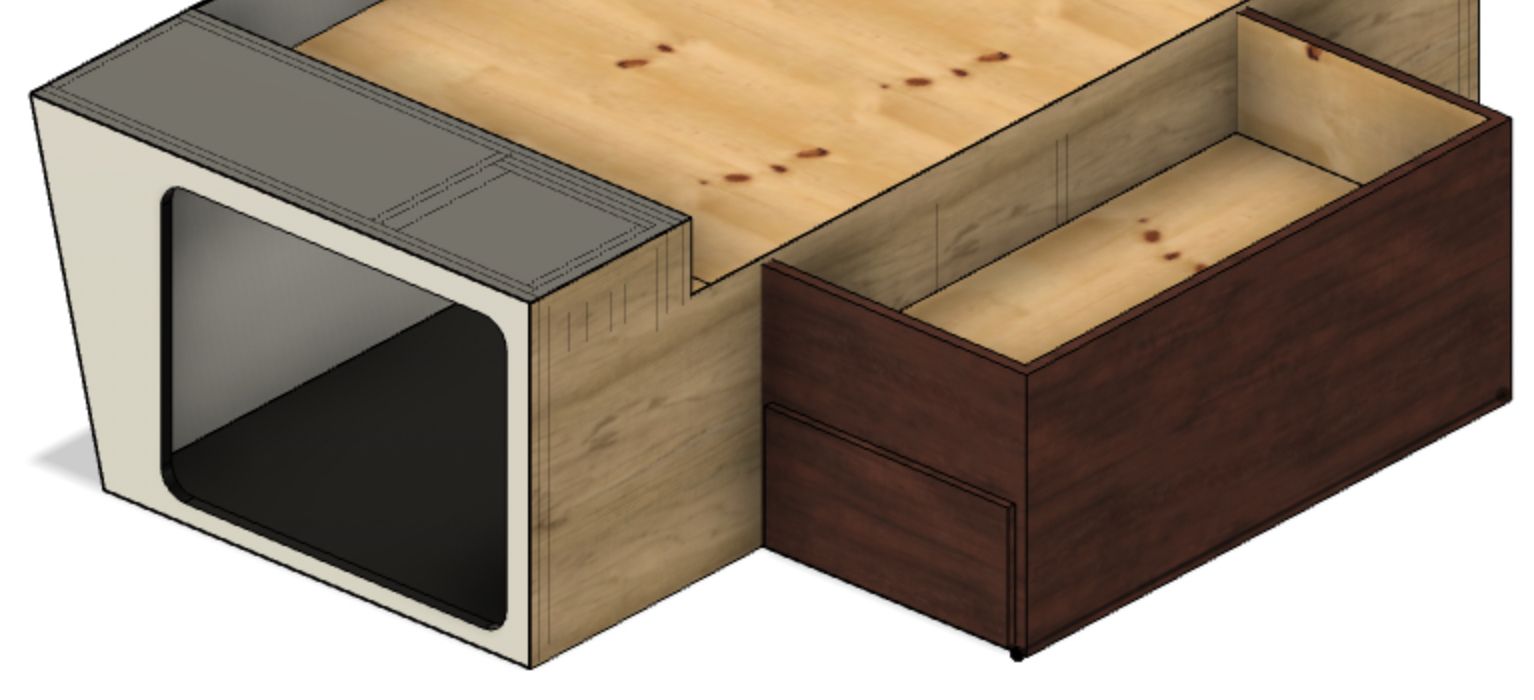


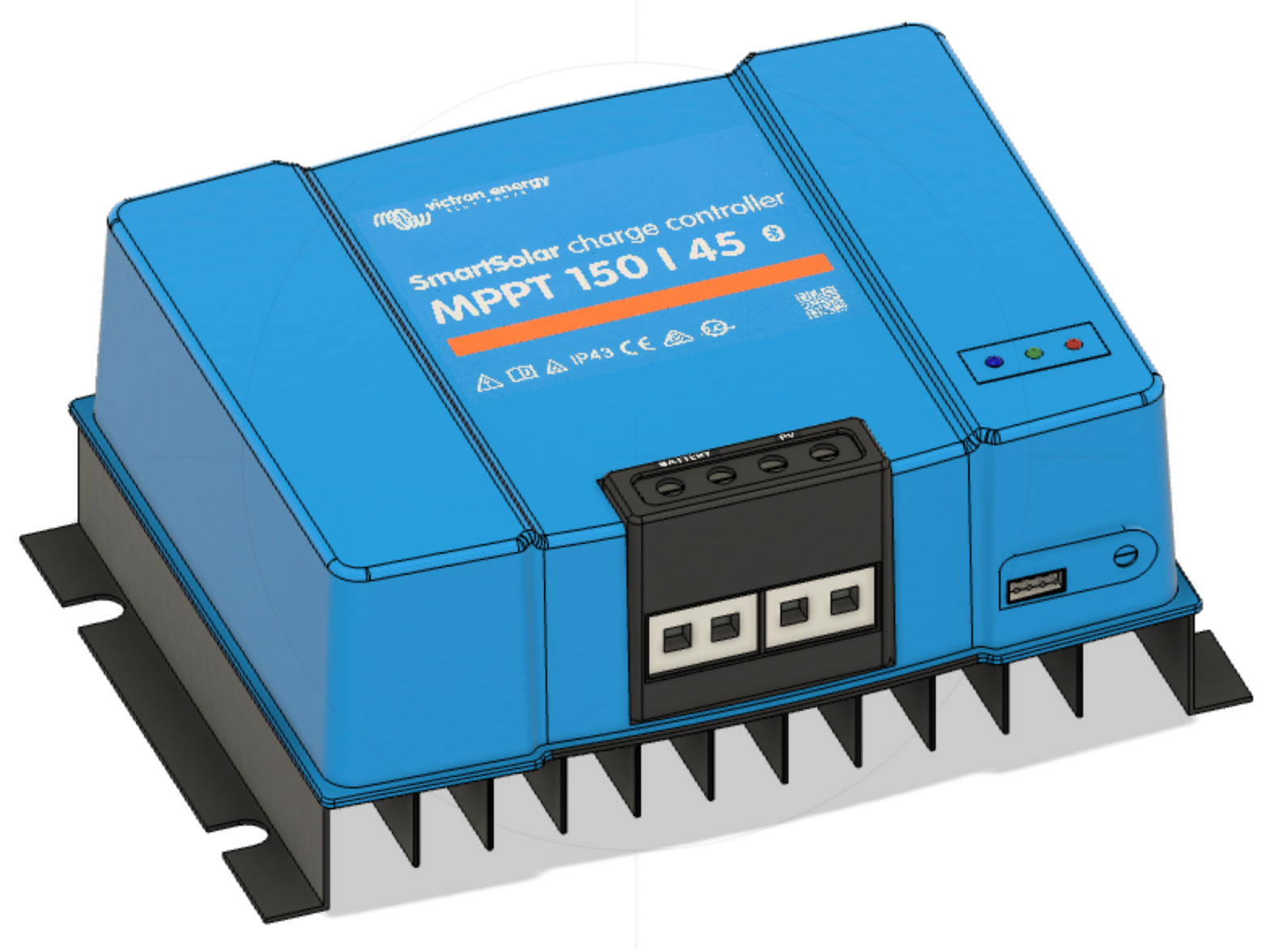
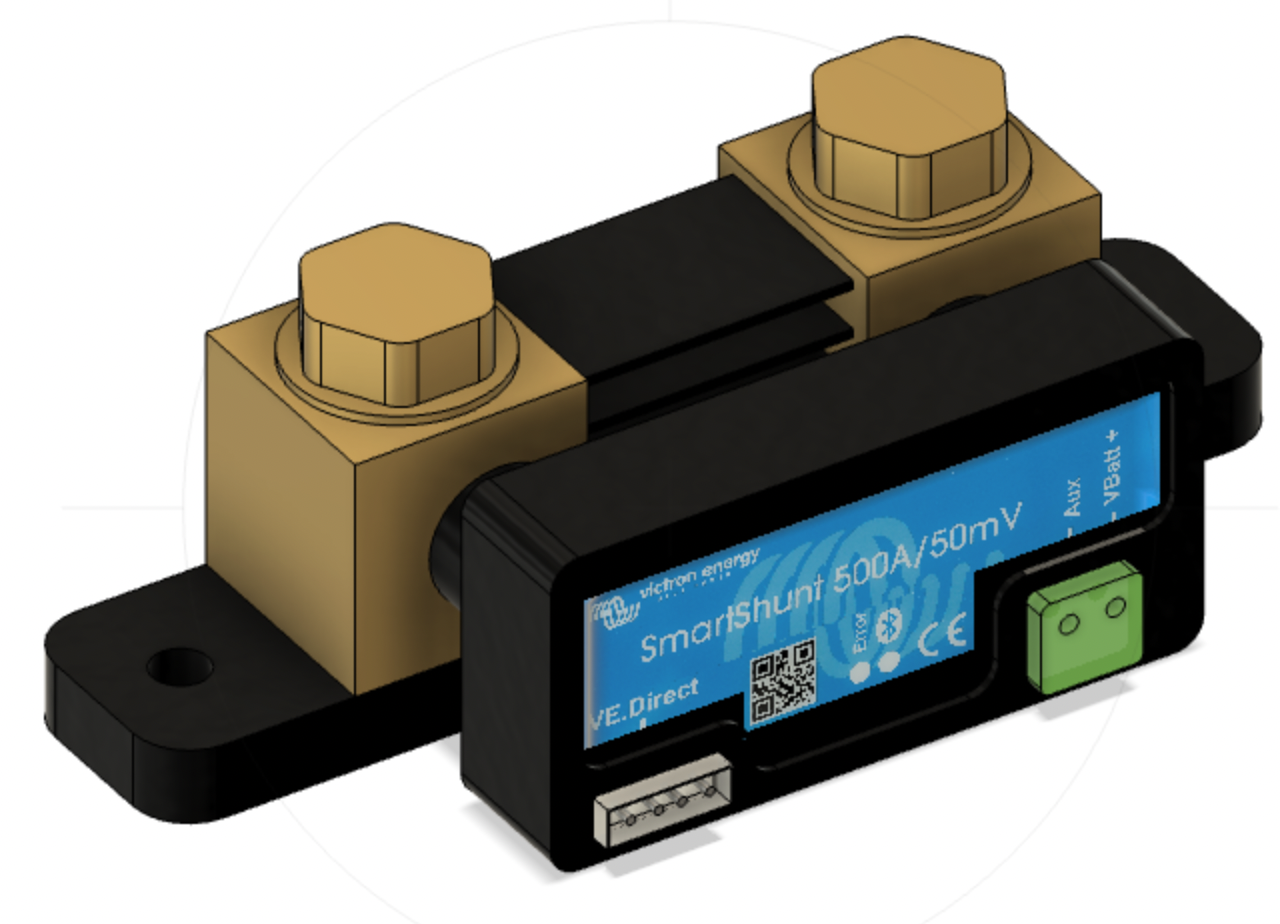

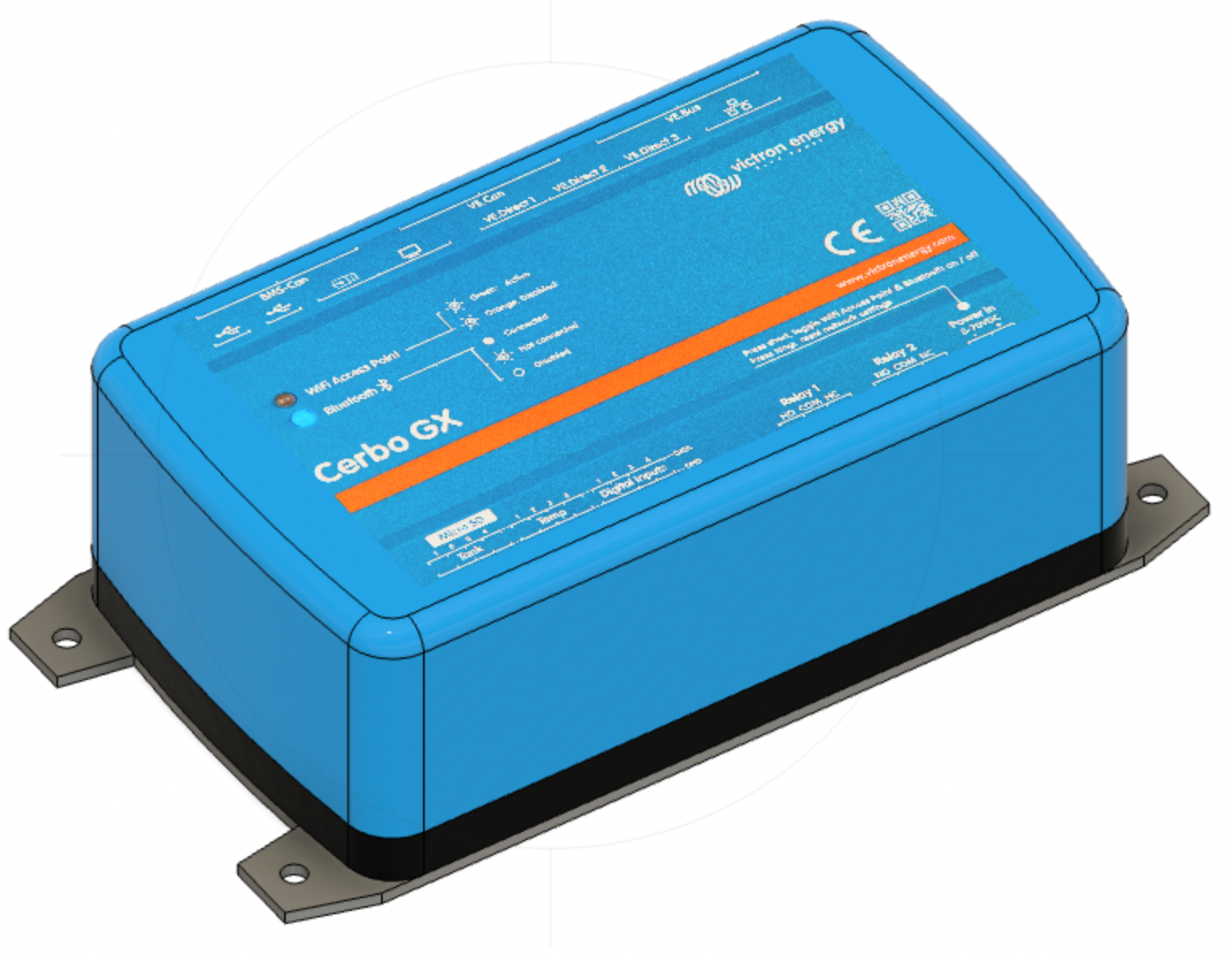
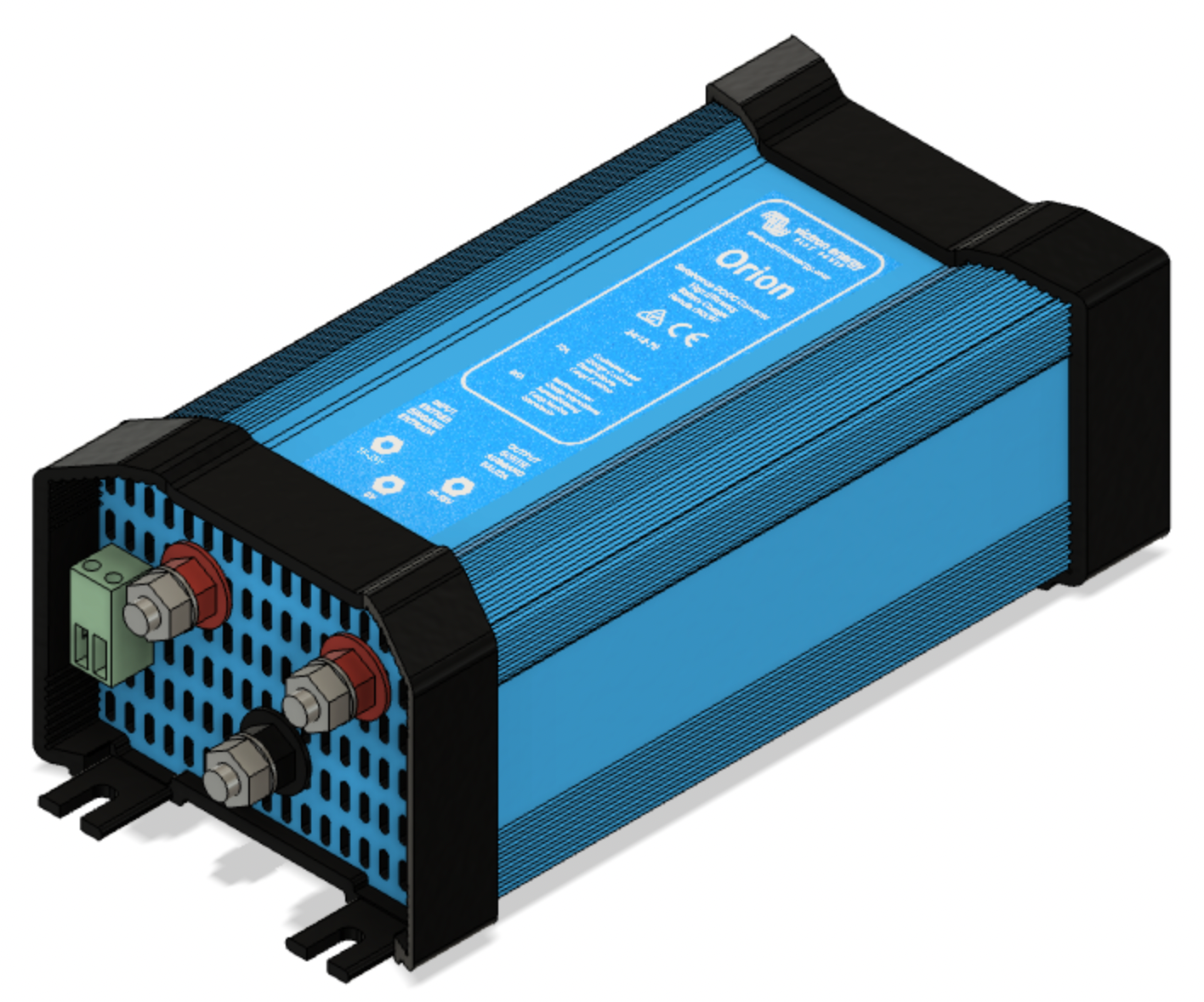

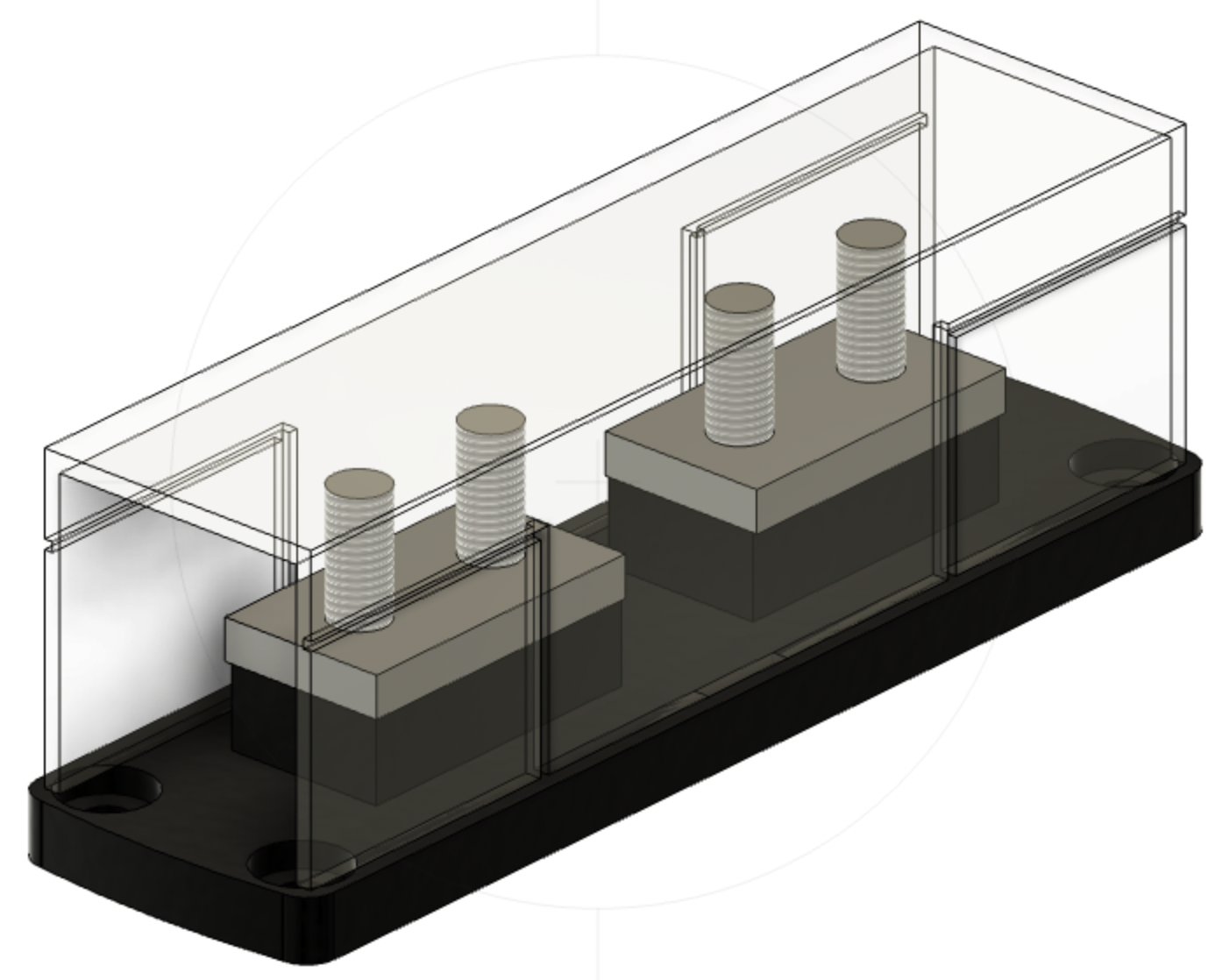
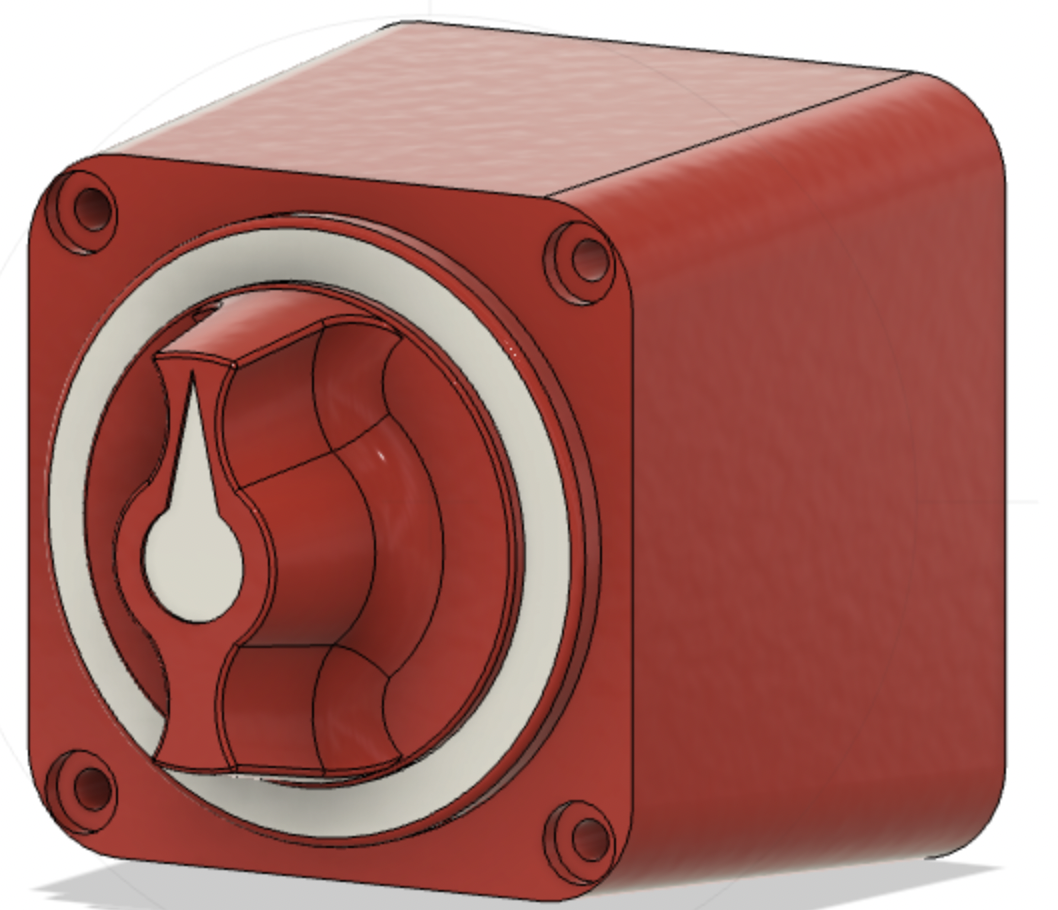



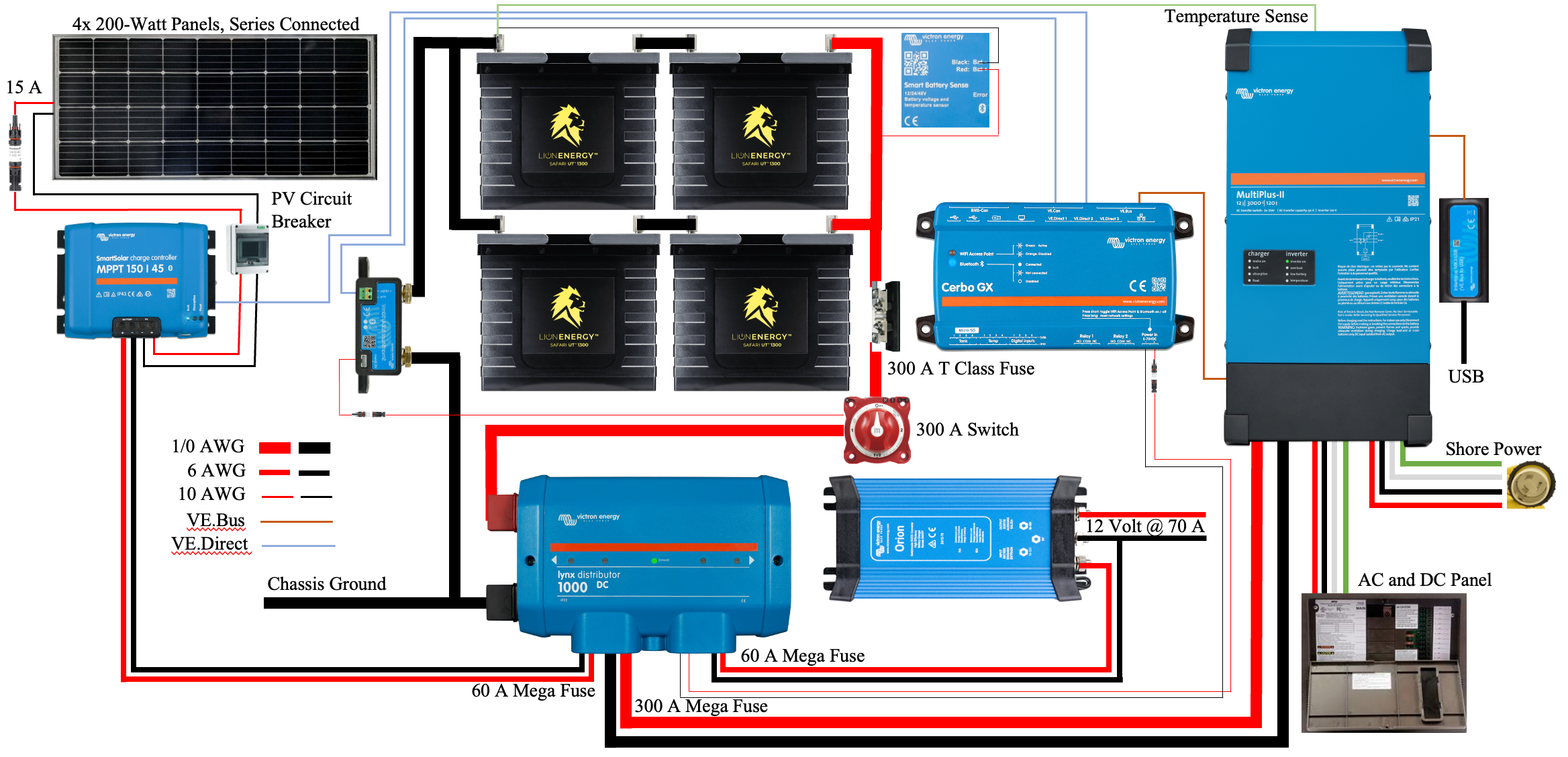



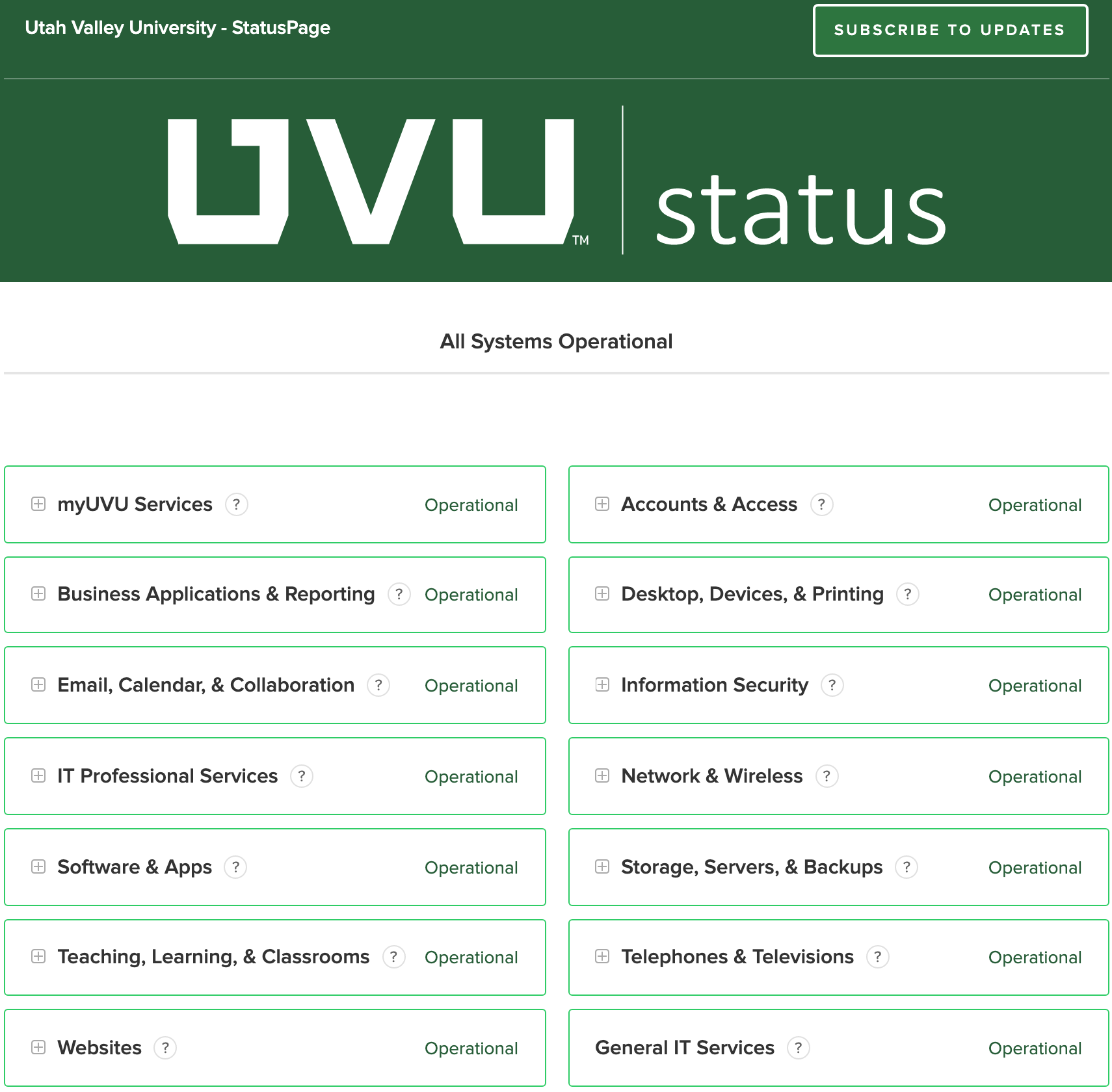
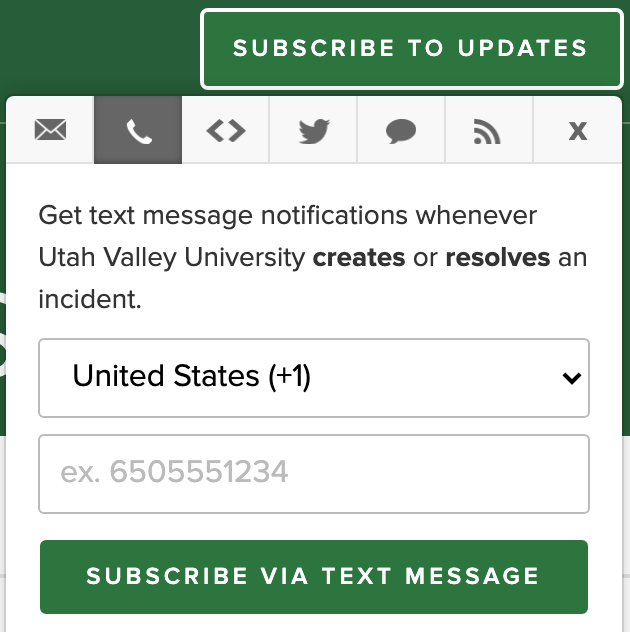
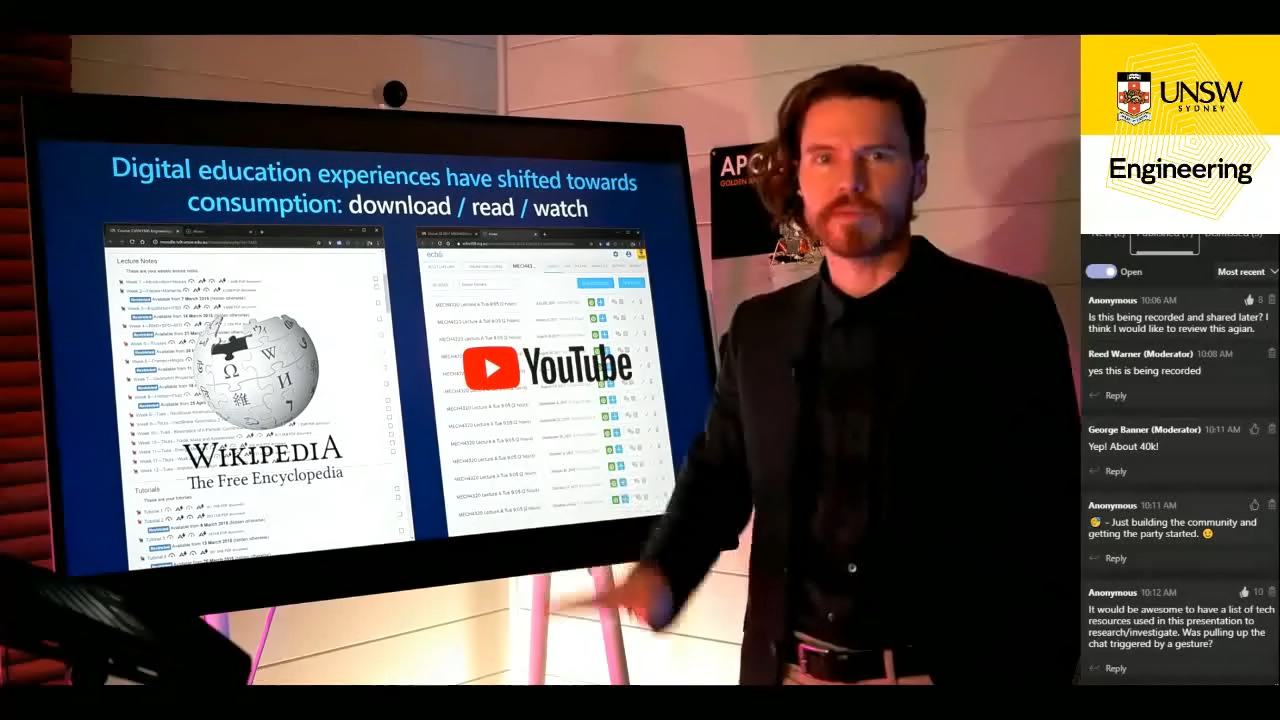
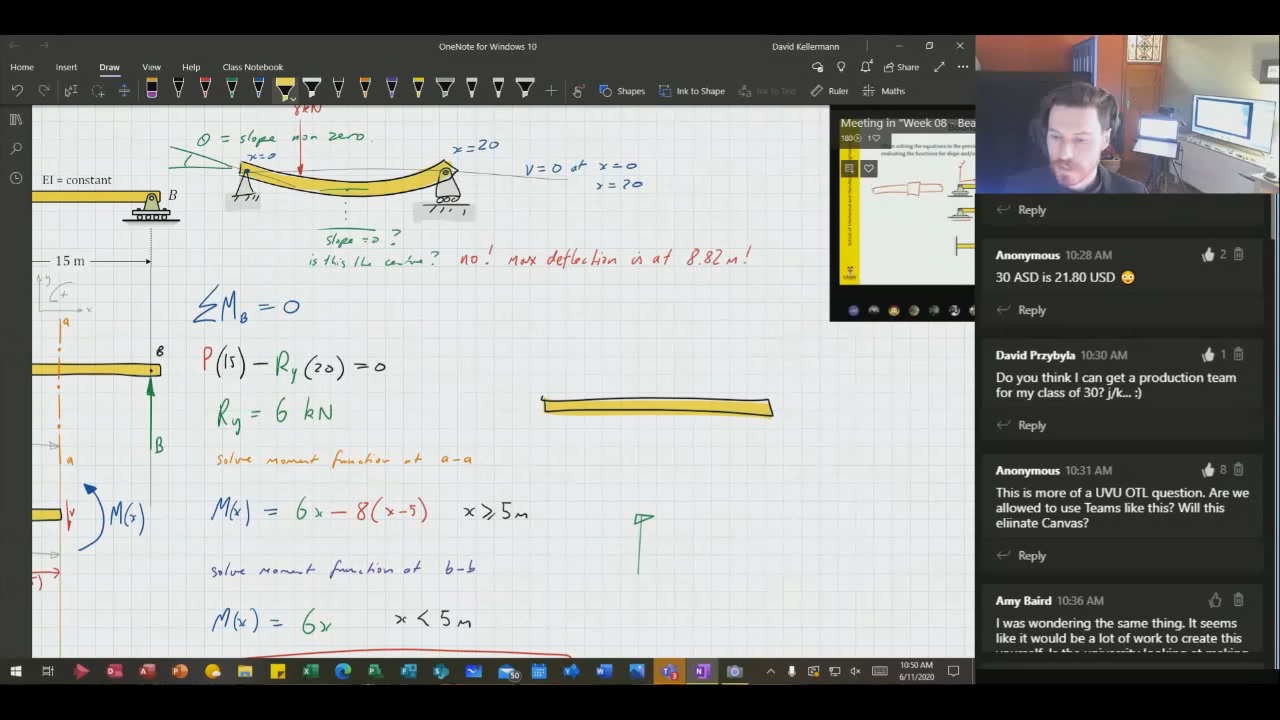
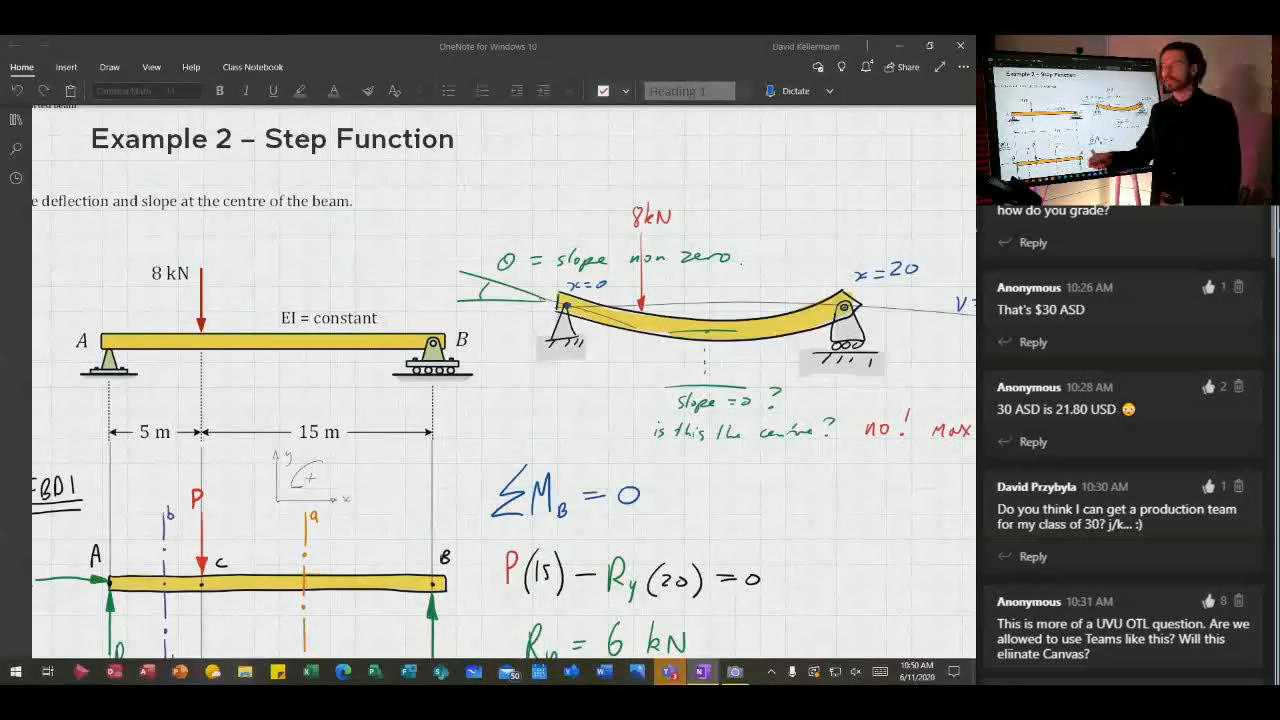
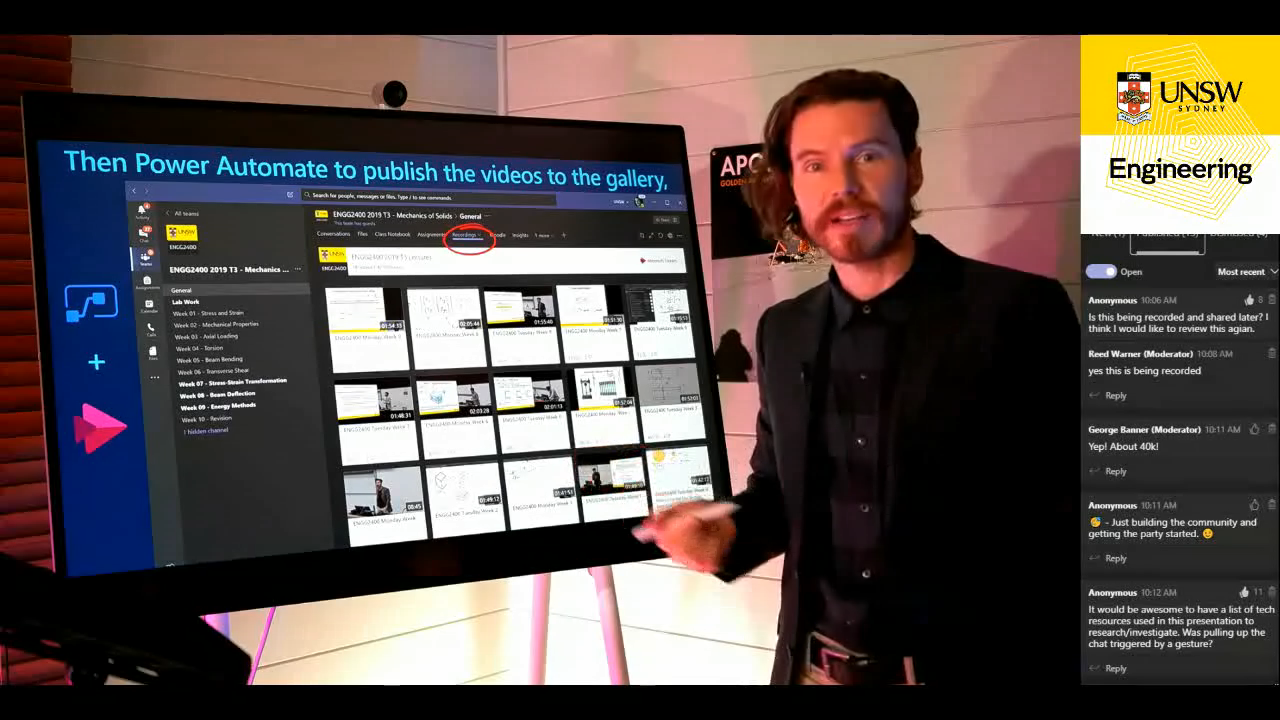


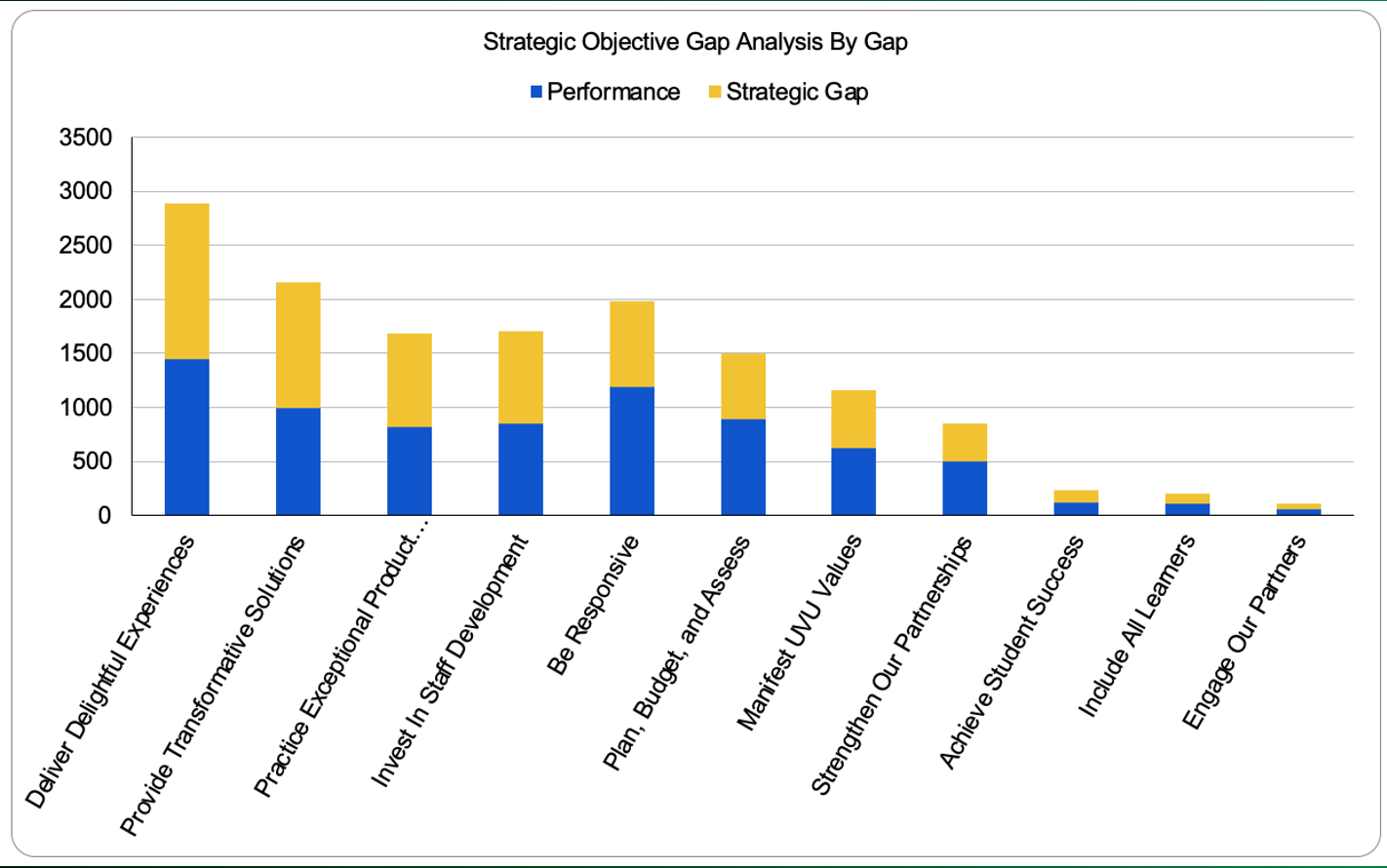
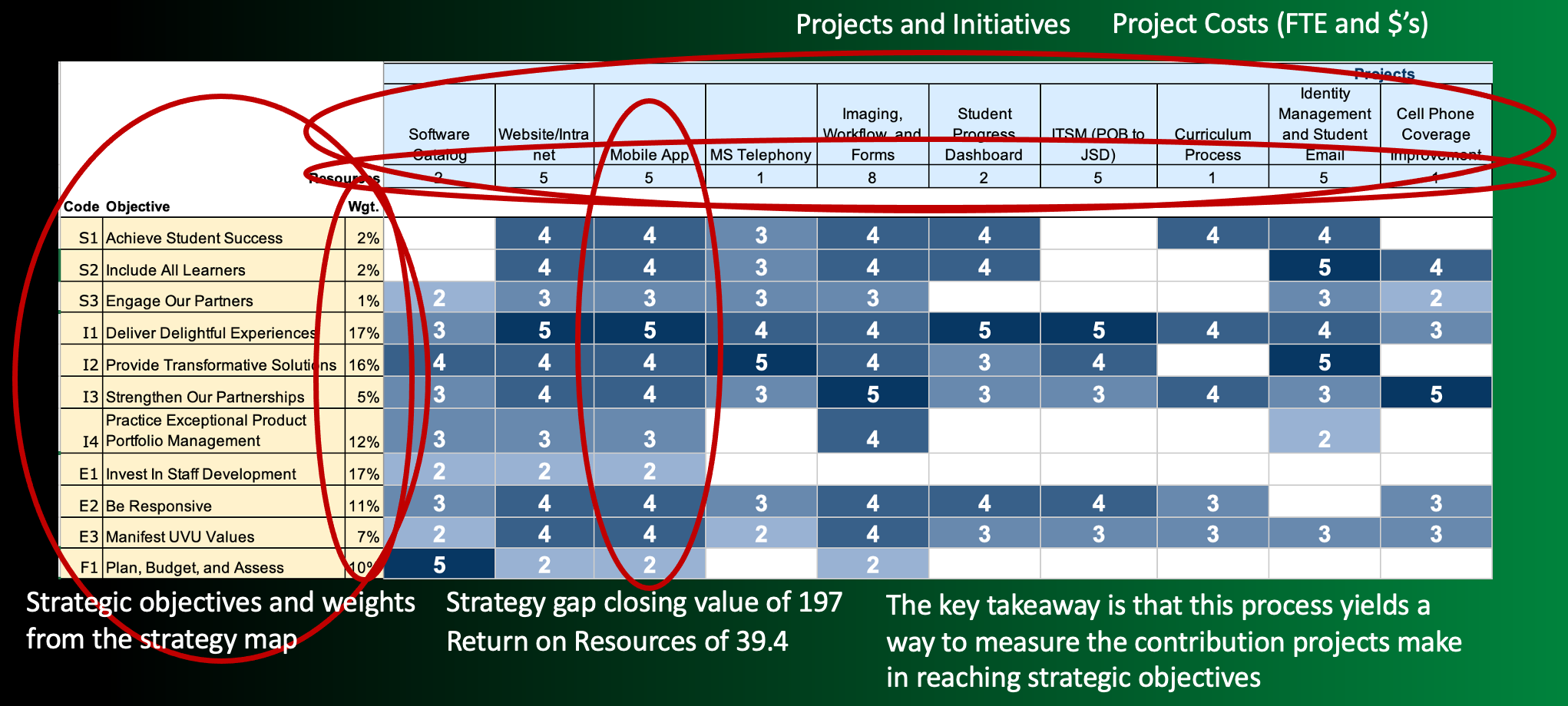
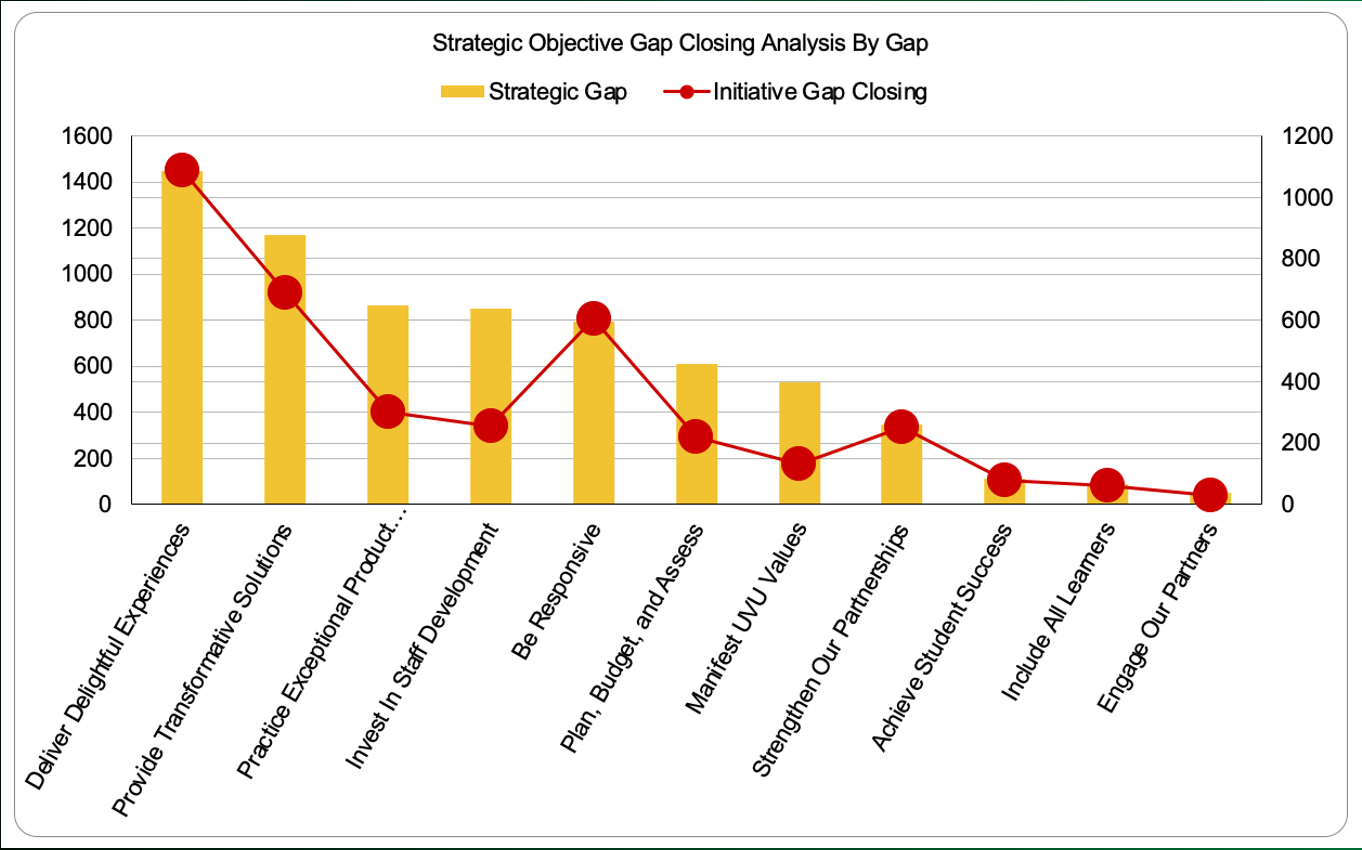



 The figure to the right is one of the 110 sub-exposures. The most significant visual issue is the significant vignetting. In addition, these exposures are likely too long given the conditions. Future attempts will be made with more subs, but shorter exposure times.
The figure to the right is one of the 110 sub-exposures. The most significant visual issue is the significant vignetting. In addition, these exposures are likely too long given the conditions. Future attempts will be made with more subs, but shorter exposure times.

